
P3Regression - Case Study
regularization解决overfitting(L2正则化解决过拟合问题)
regularization可以使曲线变得更加smooth,training data上的error变大,但是 testing data上的error变小。有关regularization的具体原理说明详见下一部分
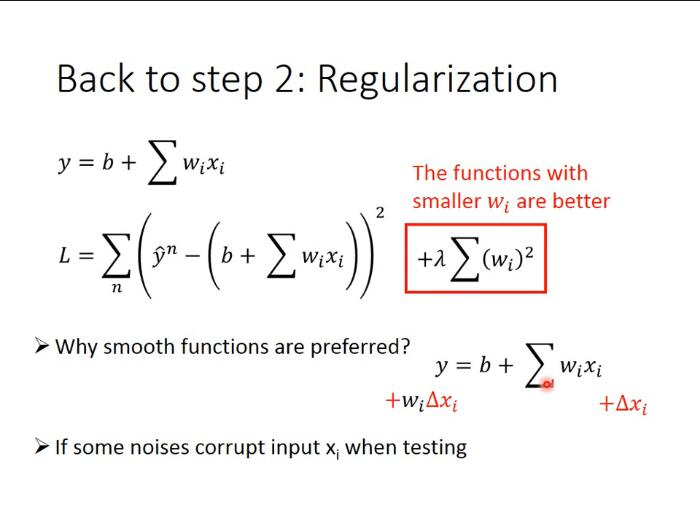
原来的loss function只考虑了prediction的error,即$$\sum_{i}{n}\left(\hat{y}{i}-\left(b+\sum_{j} w_{j} x_{j}\right)\right)^{2}$$;而regularization则是在原来的loss function的基础上加上了一项$$\lambda \sum\left(w_{i}\right)^{2}$$,就是把这个model里面所有的Wi的平方和用λ加权(其中i代表遍历n个training data,j代表遍历model的每一项)
也就是说,*我们期待参数w i w_i*w*i*越小甚至接近于0的function,为什么呢?
因为参数值接近0的function,是比较平滑的;所谓的平滑的意思是,当今天的输入有变化的时候,output对输入的变化是比较不敏感的。举例来说,对这个model,当input变化Δ x,output的变化就是,$$w_{i} \Delta x_{i}$$也就是说,如果w越i小越接近0的话,输出对输入就越不sensitive敏感,我们的function就是一个越平滑的function;说到这里你会发现,我们之前没有把bias——b这个参数考虑进去的原因是bias的大小跟function的平滑程度是没有关系的,bias值的大小只是把function上下移动而已
那为什么我们喜欢比较平滑的function呢?
如果我们有一个比较平滑的function,由于输出对输入是不敏感的,测试的时候,一些noises噪声对这个平滑的function的影响就会比较小,而给我们一个比较好的结果
注:这里的λ需要我们手动去调整以取得最好的值
λ值越大代表考虑smooth的那个regularization那一项的影响力越大,我们找到的function就越平滑
观察下图可知,当我们的λ越大的时候,在training data上得到的error其实是越大的,但是这件事情是非常合理的,因为当λ越大的时候,我们就越倾向于考虑w的值而越少考虑error的大小;但是有趣的是,虽然在training data上得到的error越大,但是在testing data上得到的error可能会是比较小的
我们喜欢比较平滑的function,因为它对noise不那么sensitive;但是我们又不喜欢太平滑的function,因为它就失去了对data拟合的能力;而function的平滑程度,就需要通过调整λ来决定,就像下图中,当λ=100时,在testing data上的error最小,因此我们选择λ=100
P4Basic Concept
bias和variance
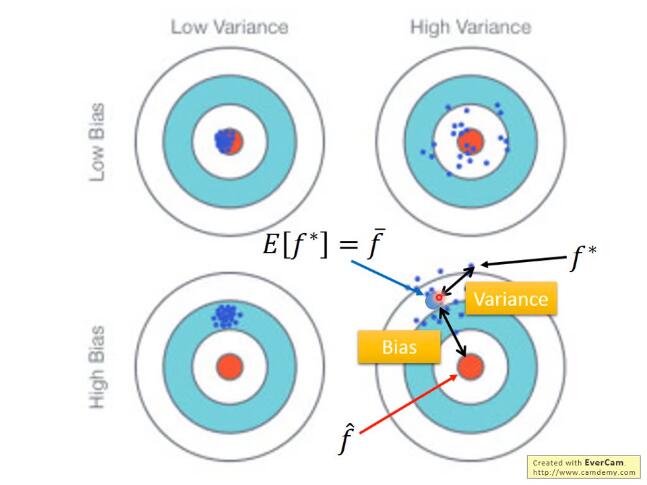
bias表示离靶心的距离, 而variance表示散布情况
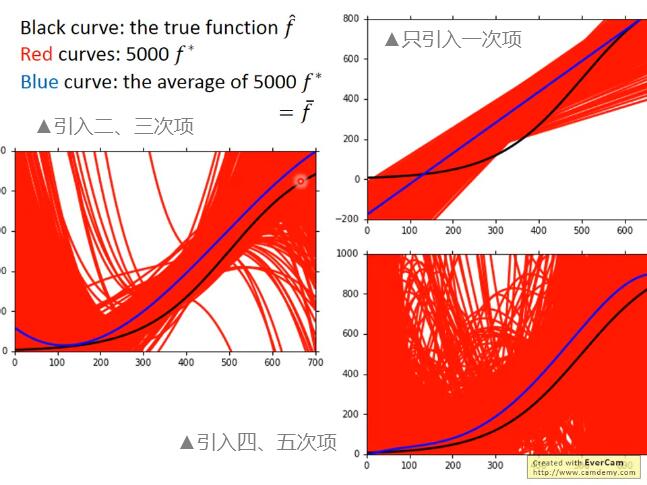
图中所示,只有足够大的函数搜索空间,才能找到正确的“靶心”,因此就需要吧模型设计得足够复杂。而复杂模型需要大数据来降低方差, 因此需要大量的数据防止过拟合
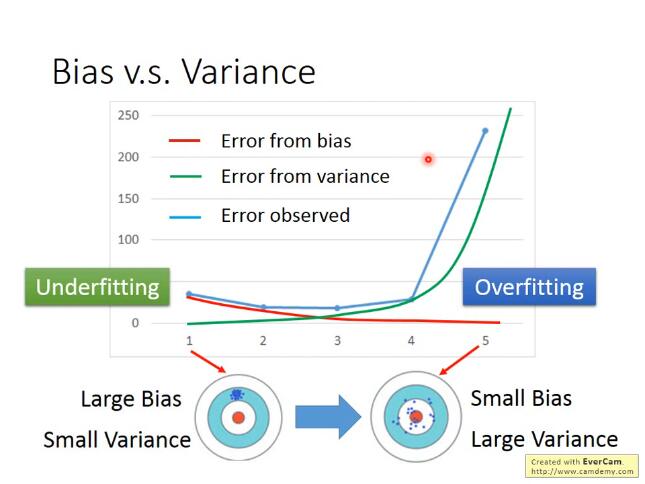
如果来自variance的误差很大, 那么就是过拟合; 如果来自bias的误差很大,那么就是欠拟合(underfitting)
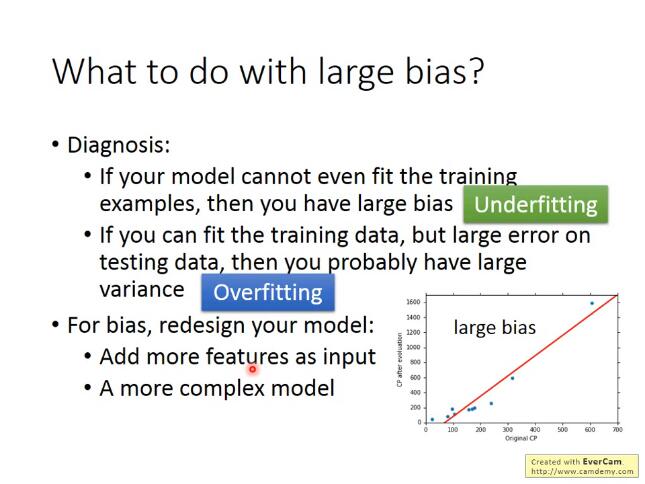
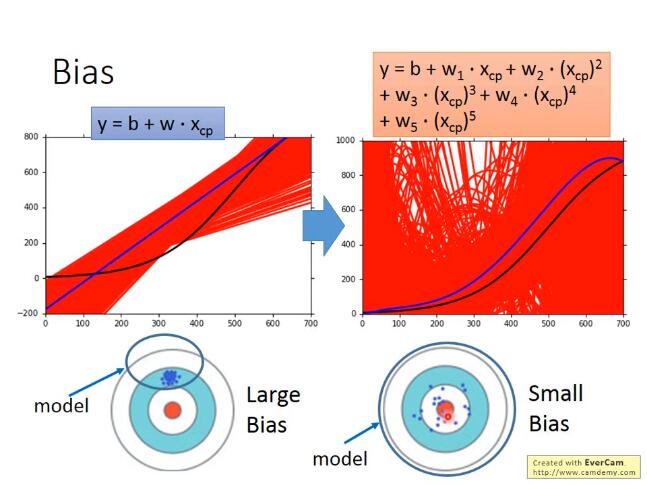
bias大: 如果无法fit训练数据, 证明是欠拟合;如果能fit训练数据,但是在测试数据上有较大的误差,那么就是过拟合——做法:增大特征or增大次项
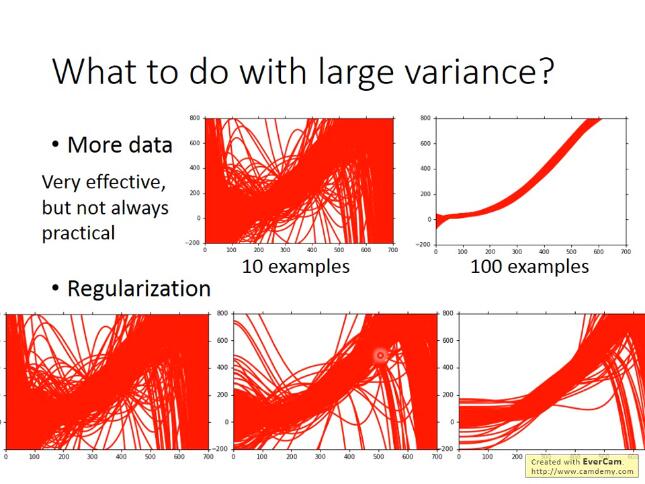
variance大: 更多的数据(数据增强)or 正则化
交叉验证:

在trainingset训练后,虽然在公开的测试集上表示良好,但是private testing set不好的话, 则还是比较糟糕的模型。因此在判断一个模型的好坏的时候, 可以将trainingSet进行交叉验证

非常不建议因为在public testing set上表现不好而反过来重新选择trainingSet的模型, 因为这相当于在训练的时候吧testing也考虑在内了, 违背了设计的初衷,并且这样的结果在private testing set上也会表现不好。
N-fold cross validation (十折交叉验证)
如果不相信某一个trainset的结果的话, 那就分很多trainset
5. P5Gradient Descent
L: loss function
: parameters(上标表示第几组参数, 下标表示这组参数中的第几个参数)

当参数有很多个的时候(>3),其实我们很难做到将loss随每个参数的变化可视化出来(因为最多只能可视化出三维的图像,也就只能可视化三维参数),但是我们可以把update的次数作为唯一的一个参数,将loss随着update的增加而变化的趋势给可视化出来(上图右半部分)
所以做gradient descent一个很重要的事情是,要把不同的learning rate下,loss随update次数的变化曲线给可视化出来,它可以提醒你该如何调整当前的learning rate的大小,直到出现稳定下降的曲线
总结:梯度下降法指的是函数值loss随梯度下降的方向减小
Adaptive Learning rates
显然这样手动地去调整learning rates很麻烦,因此我们需要有一些自动调整learning rates的方法
最基本、最简单的大原则是:learning rate通常是随着参数的update越来越小的
因为在起始点的时候,通常是离最低点是比较远的,这时候步伐就要跨大一点;而经过几次update以后,会比较靠近目标,这时候就应该减小learning rate,让它能够收敛在最低点的地方
Adagrad
Divide the learning rate of each parameter by the root mean square(方均根) of its previous derivatives
Adagrad就是将不同参数的learning rate分开考虑的一种算法(adagrad算法update到后面速度会越来越慢,当然这只是adaptive算法中最简单的一种)
Stochastic Gradicent Descent
随机梯度下降的方法可以让训练更快速,传统的gradient descent的思路是看完所有的样本点之后再构建loss function,然后去update参数;而stochastic gradient descent的做法是,看到一个样本点就update一次,因此它的loss function不是所有样本点的error平方和,而是这个随机样本点的error平方
Feature Scaling
概念介绍
特征缩放,当多个特征的分布范围很不一样时,最好将这些不同feature的范围缩放成一样

对gradient decent的帮助
之前我们做的demo已经表明了,对于这种长椭圆形的error surface,如果不使用Adagrad之类的方法,是很难搞定它的,因为在像w1和w2这样不同的参数方向上,会需要不同的learning rate,用相同的lr很难达到最低点
如果有scale的话,loss在参数w1、w2平面上的投影就是一个正圆形,update参数会比较容易
而且gradient descent的每次update并不都是向着最低点走的,每次update的方向是顺着等高线的方向(梯度gradient下降的方向),而不是径直走向最低点;但是当经过对input的scale使loss的投影是一个正圆的话,不管在这个区域的哪一个点,它都会向着圆心走。因此feature scaling对参数update的效率是有帮助的
scaling method:
z-score:
归一化
gradient descent数学理论


注意 learning rate需要设置好, 否则Δθ不为0, 则泰勒近似不成立。
gradient descent的限制
▲gradient descent的限制是,它在gradient即微分值接近于0的地方就会停下来,而这个地方不一定是global minima,它可能是local minima,可能是saddle point鞍点,甚至可能是一个loss很高的plateau平缓高原
6. P10Classification_1
特征、特征向量是什么?
要想把一个东西当做计算机能理解的function的input,就需要把它数值化
特性数值化:用一组数字来描述一只宝可梦的特性, 比如用一组数字表示它有多强(total strong)、它的生命值(HP)、它的攻击力(Attack)、它的防御力(Defense)、它的特殊攻击力(Special Attack)、它的特殊攻击的防御力(Special defend)、它的速度(Speed),以皮卡丘为例,我们可以用以上七种特性的数值就是特征量, 而多个特征量所组成的vector就是特征向量
我们希望蓝色的这些属于class 1的宝可梦,input到Regression的model,output越接近1越好;红色的属于class 2的宝可梦,input到Regression的model,output越接近-1越好。如果使用回归来硬解分类问题的话, 异常值影响比较大。 异常值则远远大于1, 跟目标不一致
Regression的output是连续性质的数值,而classification要求的output是离散性质的点,我们很难找到一个Regression的function使大部分样本点的output都集中在某几个离散的点附近
因此,Regression定义model好坏的定义方式对classification来说是不适用的
Solution:Generative model——朴素贝叶斯分类器
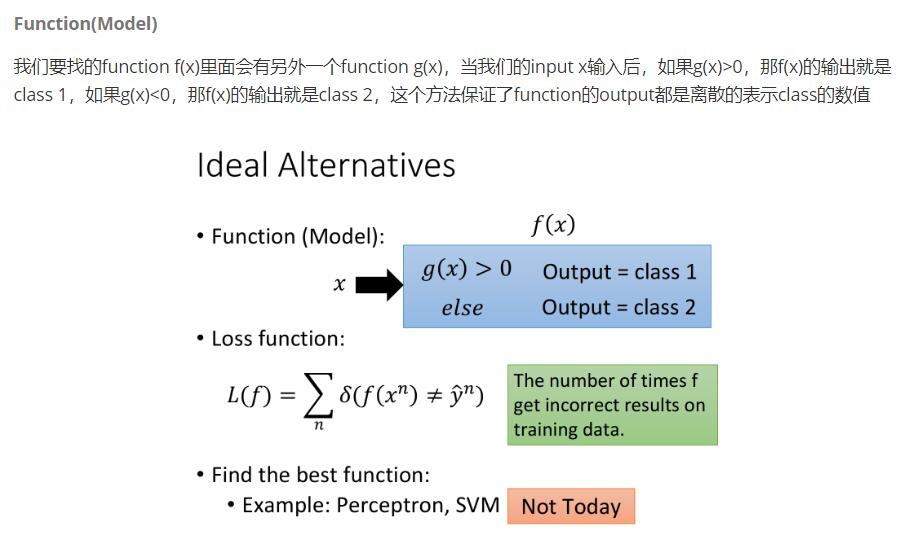
我们可以把loss function定义成,即这个model在所有的training data上predict预测错误的次数,也就是说分类错误的次数越少,这个function表现得就越好
贝叶斯公式=单条路径概率/所有路径概率和
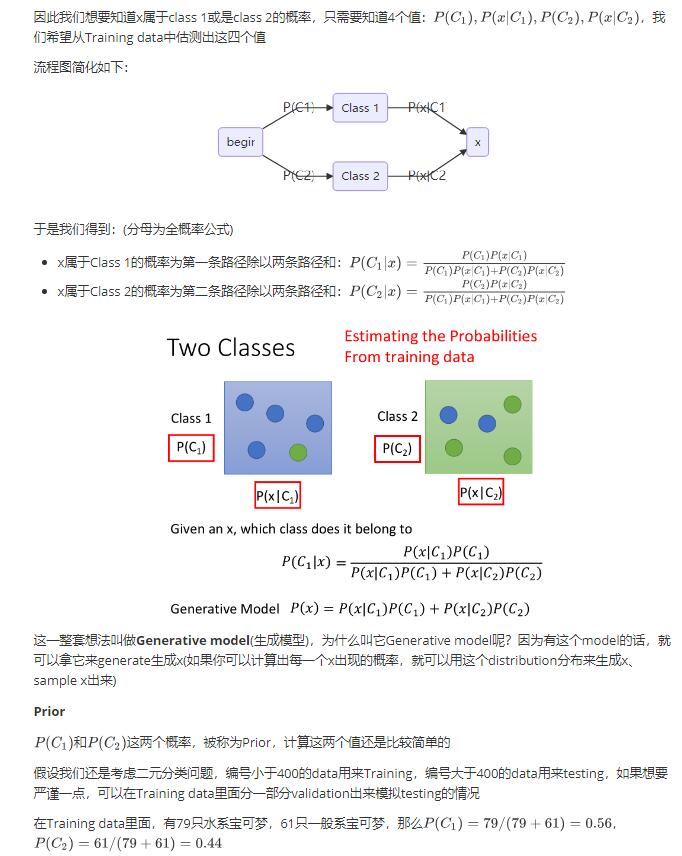
这一整套想法叫做Generative model(生成模型),为什么叫它Generative model呢?因为有这个model的话,就可以拿它来generate生成x(如果你可以计算出每一个x出现的概率,就可以用这个distribution分布来生成x、sample x出来)
现在的问题是,怎么得到 和 的值==> 认为数据服从 高斯分布
高斯分布
假设海龟的vector是[103 45],虽然这个点在已有的数据里并没有出现过,但是不可以认为它出现的概率为0,我们需要用已有的数据去估测海龟出现的可能性
你可以想象说这已有的79只水系宝可梦的data其实只是冰山一角,假定水系神奇宝贝的Defense和SP Defense是从一个Gaussian的distribution里面sample出来的,下图只是采样了79个点之后得到的分布,但是从高斯分布里采样出海龟这个点的几率并不是0,那从这79个已有的点,怎么找到那个Gaussian distribution函数呢?
最大似然估计_参数估计
那接下来的问题就是怎么去找出这个Gaussian,只需要去估测出这个Gaussian的均值和协方差即可
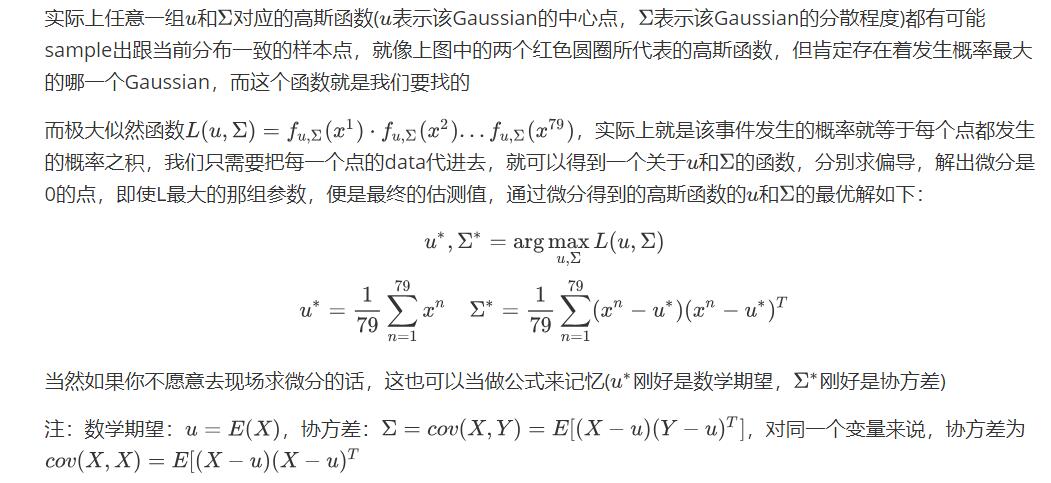
估测和的方法就是极大似然估计法(Maximum Likelihood),极大似然估计的思想是,找出最特殊的那对u和covariance,从它们共同决定的高斯函数中再次采样出79个点,使”得到的分布情况与当前已知79点的分布情况相同“这件事情发生的可能性最大===>最大似然估计
根据sample样本, 求得使出现该样本组合可能性最大(所以是每一个点产生的概率相乘)的那组参数
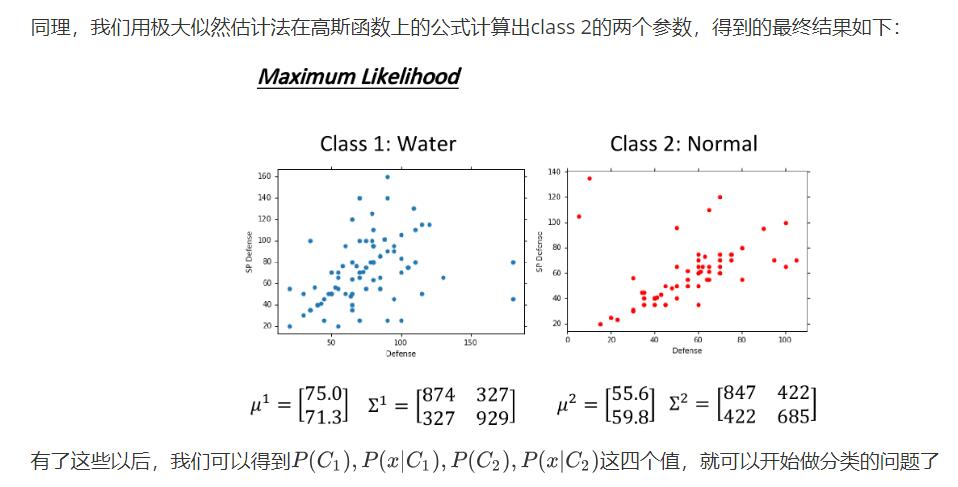
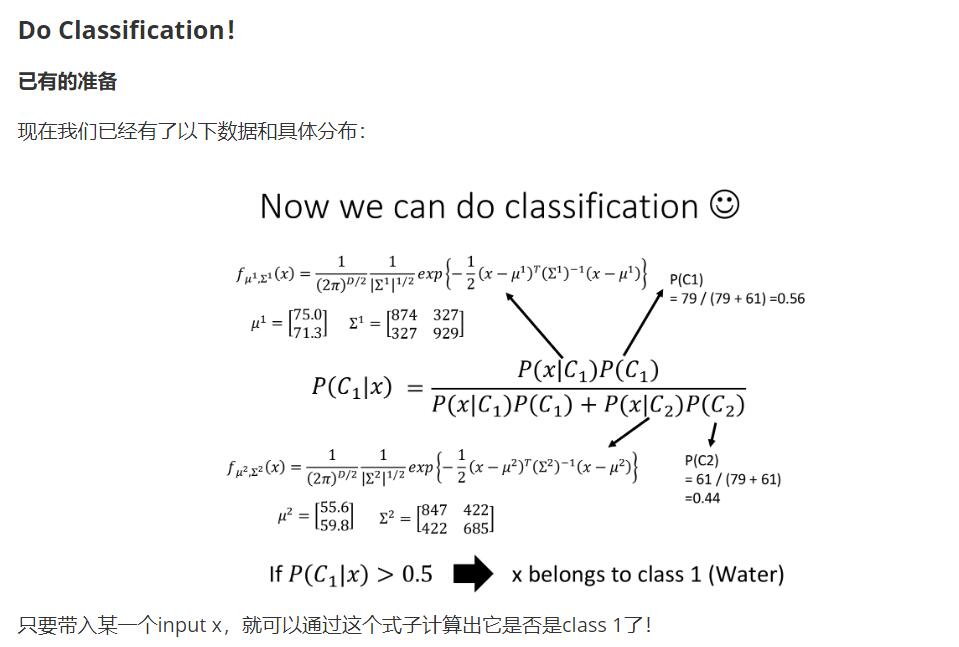
预测:
===> 训练结束:再把testing data上得到的结果可视化出来,即右下角的图,发现分的不是太好,正确率才是47%我们之前用的只是Defense和SP Defense这两个参数,在二维空间上得到的效果不太好,但实际上一开始就提到了宝可梦总共是有6个features的,也许在二维空间上它们是重叠在一起的,但是在六维空间上看它们也许会分得很好,每一个宝可梦都是六维空间中的一个点,于是我们的是一个6-dim的vector,则是一个6*6的matrix,发现得到的准确率也才64%,这个分类器表现得很糟糕,是否有办法将它改进的更好?
Modifying Model
其实之前使用的model是不常见的,你是不会经常看到给每一个Gaussian都有自己的mean和covariance,比如我们的class 1用的是u1和,class 2用的是u2和,比较常见的做法是,不同的class可以share同一个cocovariance matrix
其实variance是跟input的feature size的平方成正比的,所以当feature的数量很大的时候,大小的增长是可以非常快的,在这种情况下,给不同的Gaussian以不同的covariance matrix,会造成model的参数太多,而参数多会导致该model的variance过大,出现overfitting的现象,因此对不同的class使用同一个covariance matrix,可以有效减少参数
案例总结
回顾几率模型
machine learning可以概况为以下三个step
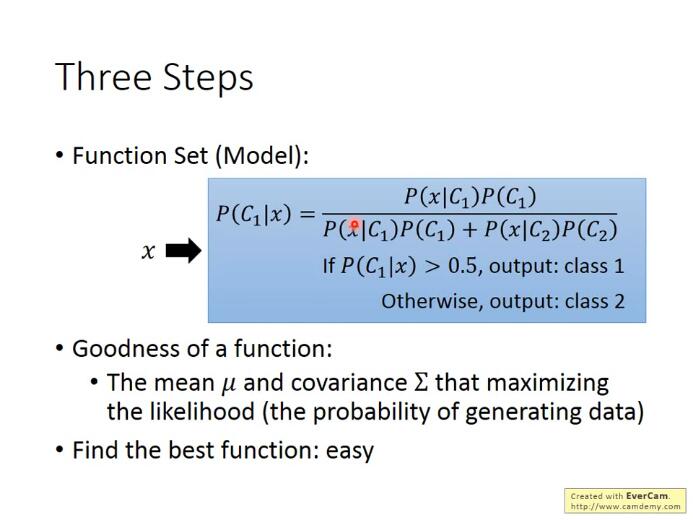
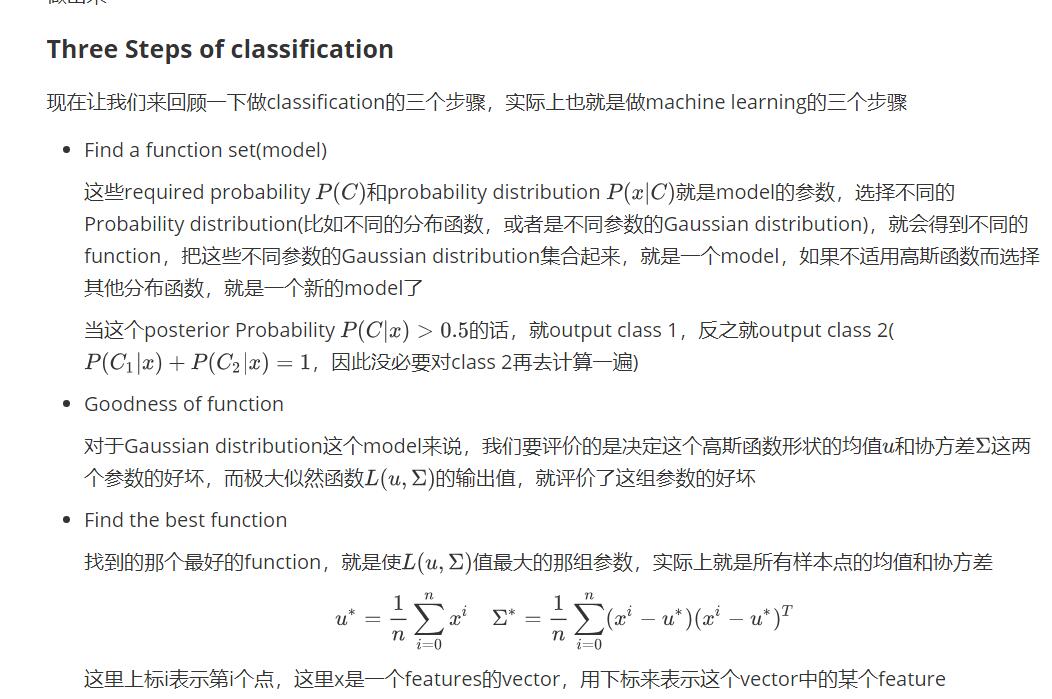
选择的概率分布为经验之谈: 可以选择任意你喜欢的, 但是最后还是得看效果: 如果你选择的是简单的分布函数(参数比较少),那你的bias就大,variance就小;如果你选择复杂的分布函数,那你的bias就小,variance就大,那你就可以用data set来判断一下,用什么样的Probability distribution作为model是比较好的
朴素贝叶斯:
这里每一个dimension的分布函数都是一维的Gaussian distribution,如果这样假设的话,等于是说,原来那多维度的Gaussian,它的covariance matrix变成是diagonal(对角的),在不是对角线的地方,值都是0,这样就可以更加减少需要的参数量,就可以得到一个更简单的model
我们把上述这种方法叫做Naive Bayes Classifier(朴素贝叶斯分类法),如果真的明确了所有的feature之间是相互独立的,是不相关的,使用朴素贝叶斯分类法的performance是会很好的,如果这个假设是不成立的,那么Naive bayes classfier的bias就会很大,它就不是一个好的classifier(朴素贝叶斯分类法本质就是减少参数)
当然这个例子里如果使用这样的model,得到的结果也不理想,因为各种feature之间的covariance还是必要的,比如战斗力和防御力它们之间是正相关的,covariance不能等于0
总之,寻找model总的原则是,尽量减少不必要的参数,但是必然的参数绝对不能少
那怎么去选择分布函数呢?有很多时候凭直觉就可以看出来,比如宝可梦有某个feature是binary的,它代表的是:是或不是,这个时候就不太可能是高斯分布了,而很有可能是伯努利分布(两点分布)
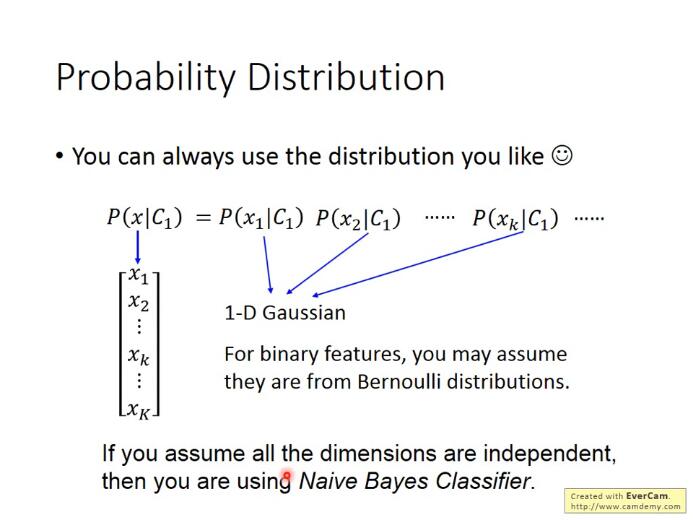
Analysis Posterior Probability分析后置概率的表达式
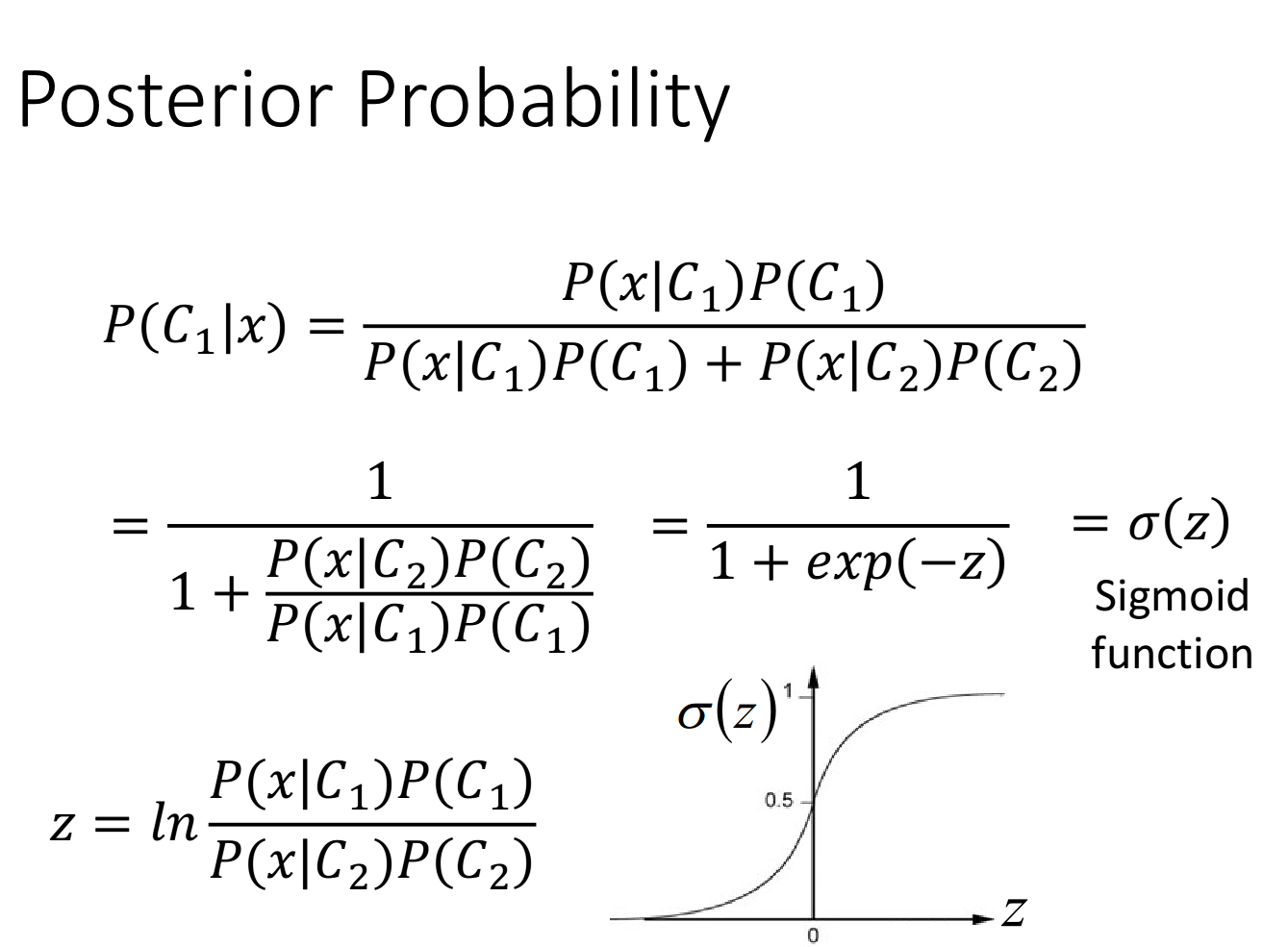
上面的推导过程可能比较复杂,但是得到的最终结果还是比较好的:(当和共用一个时,经过化简相消z就变成了一个linear的function,x的系数是一个vector w,后面的一大串数字其实就是一个常数项b)
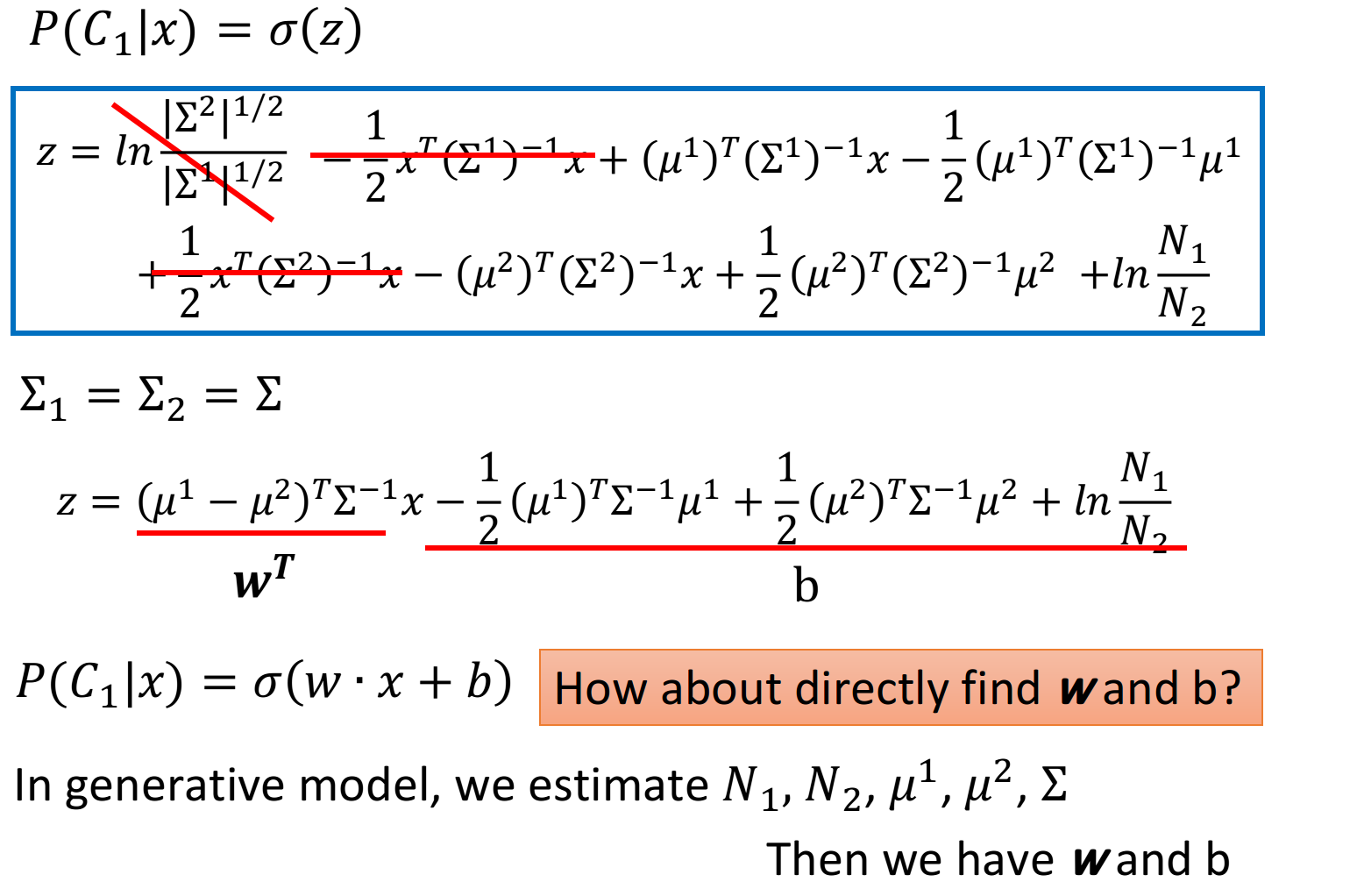
这个式子就解释了,当class 1和class 2共用的时候,它们之间的boundary会是linear的
7. P11Logistic Regression
Three Steps of machine learning
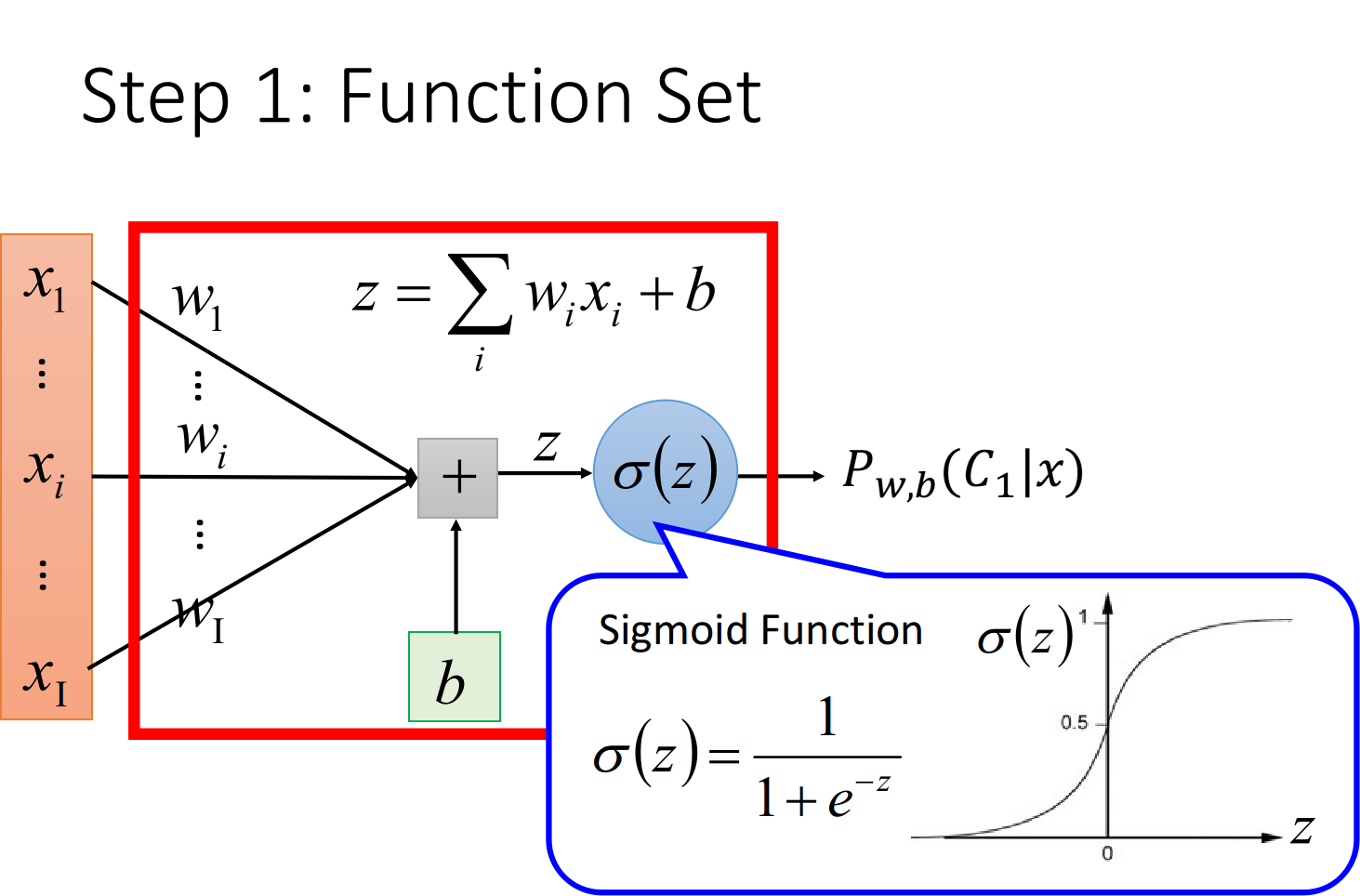
Step 1:function set
这里的function set就是Logistic Regression——逻辑回归
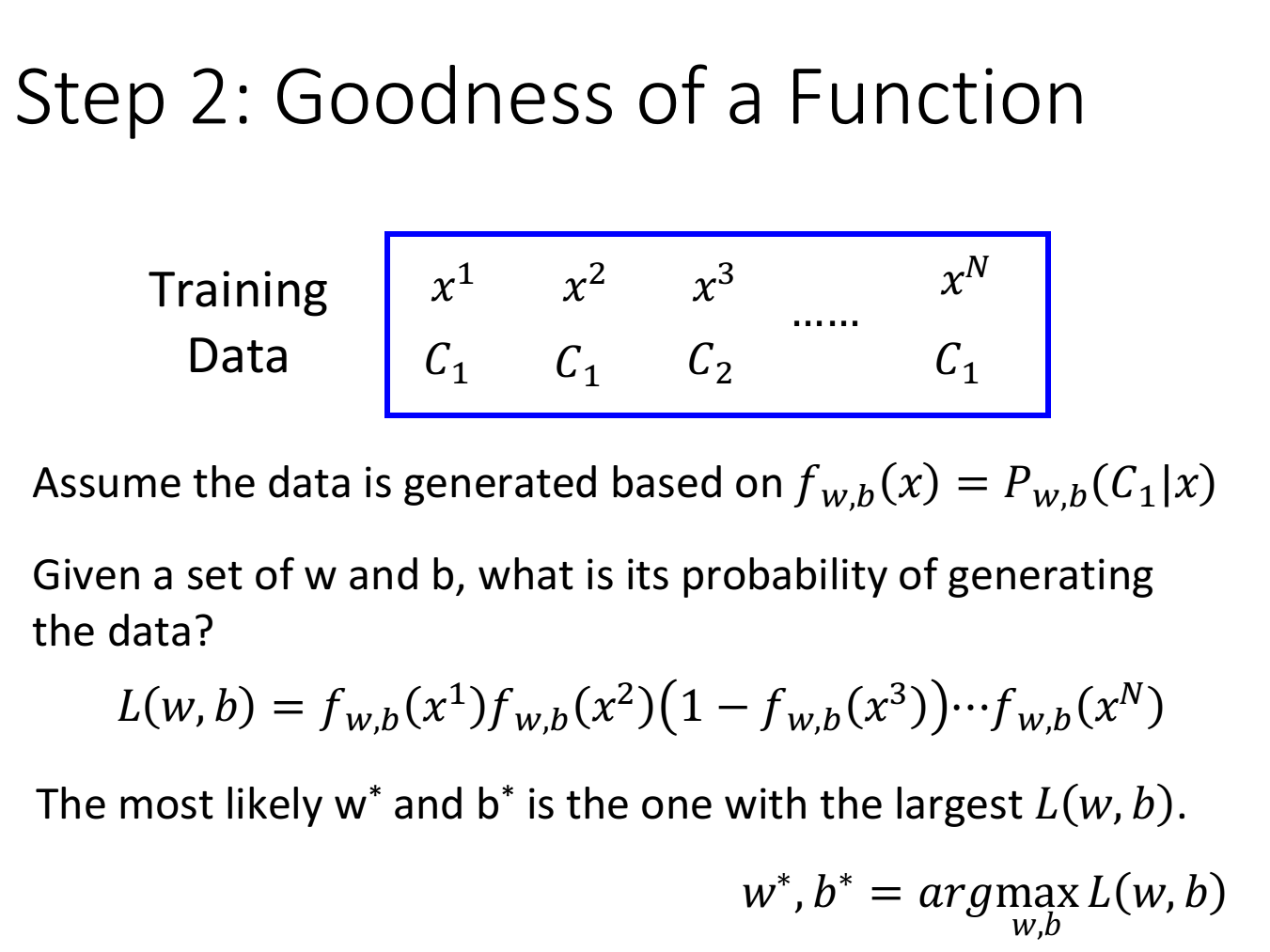
Step 2:Goodness of a function
现在我们有N笔Training data,每一笔data都要标注它是属于哪一个class
假设这些Training data是从我们定义的posterior Probability中产生的(后置概率,某种意义上就是概率密度函数),而w和b就决定了这个posterior Probability,那我们就可以去计算某一组w和b去产生这N笔Training data的概率,利用极大似然估计的思想,最好的那组参数就是有最大可能性产生当前N笔Training data分布的和
似然函数只需要将每一个点产生的概率相乘即可,注意,这里假定是二元分类,class 2的概率为1减去class 1的概率. 为x为C1种类的概率, 则在二元分类中
由于 是乘积项的形式, 为了方便计算, 我们将上式做个变换: (注意这边的L(w,b) 是最大似然函数, 而不是Loss function)
由于class 1和class 2的概率表达式不统一,上面的式子无法写成统一的形式, 为了统一格式, 这里将Logistic Regression里的所有Training data都打上0和1的标签, 即output 代表class output 代表class 于是上式进一步改写成:
现在已经有了统一的格式, 我们就可以把要minimize的对象写成一个summation的形式:
这里表示第n个样本点,表示第n个样本点的class标签(1表示class 1,0表示class 2),最终这个summation的形式,里面其实是两个Bernouli distribution(两点分布)的cross entropy(交叉熵)
交叉熵
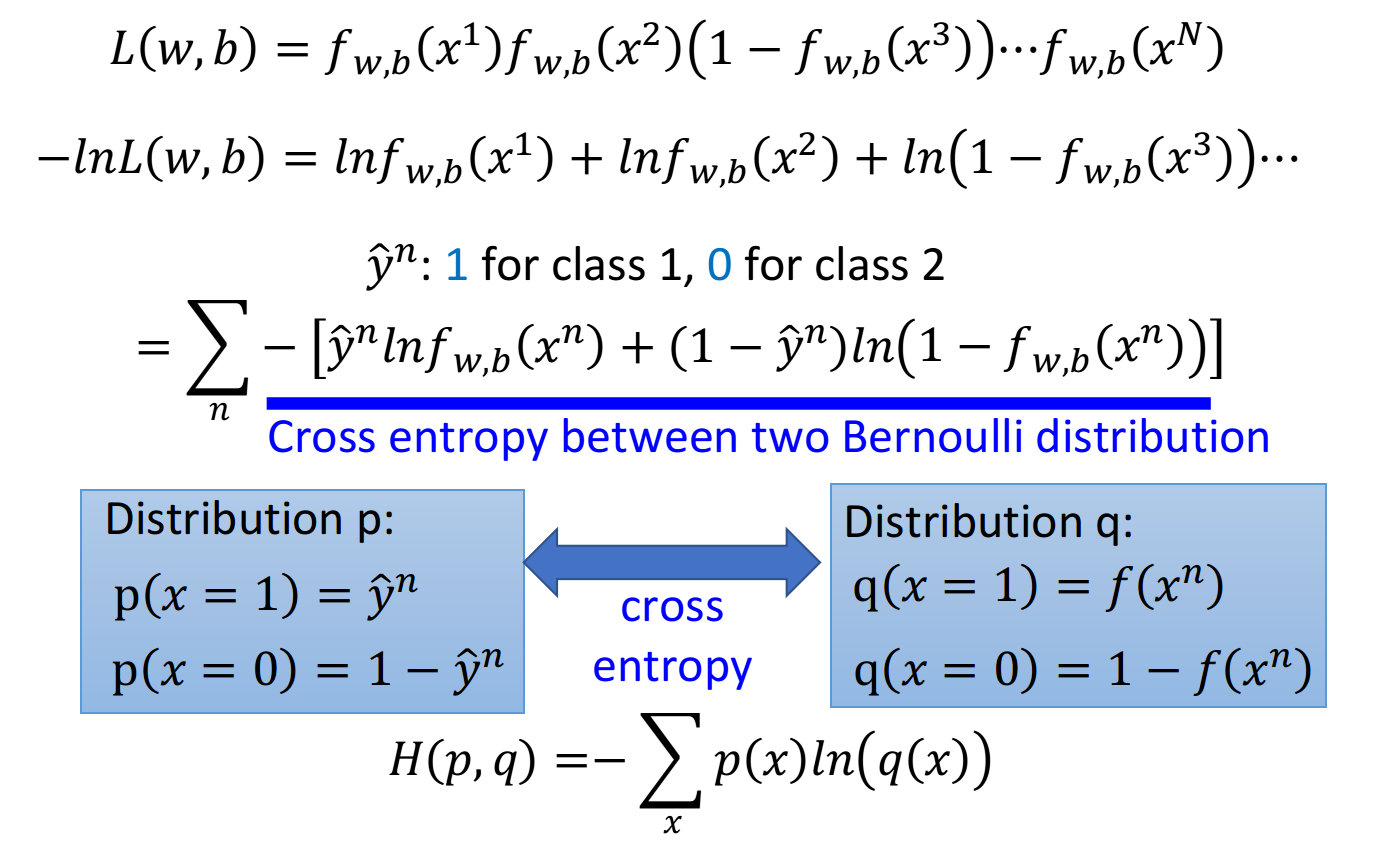
假设有如上图所示的两个distribution p和q,它们的交叉商就是 这也就是之前的 推导中在 前加一个负号的原因
cross entropy交叉嫡的含义是表达这两个distribution有多接近, 如果p和q这两个distribution一模一样的话, 那 它们算出来的cross entropy就是0(详细解释在“信息论"中), 而这里 表示function的output, 表示预期 的 target, 因此交叉嫡实际上表达的是希望这个function的output和它的target越接近越好
总之, 我们要找的参数实际上就是:
step 3:Find the best function
实际上就是去找到使loss function即交叉嫡之和最小的那组参数 就行了, 这里用gradient descent的方法进 行运算就Ok
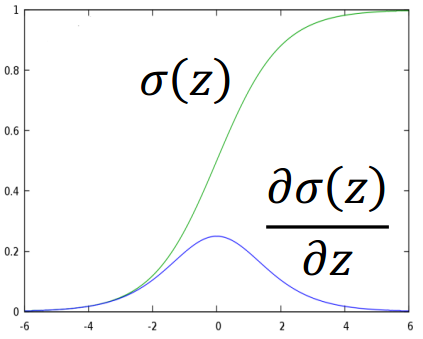
这里sigmoid function的微分可以直接作为公式记下来: sigmoid和它的微分的图像如 下:
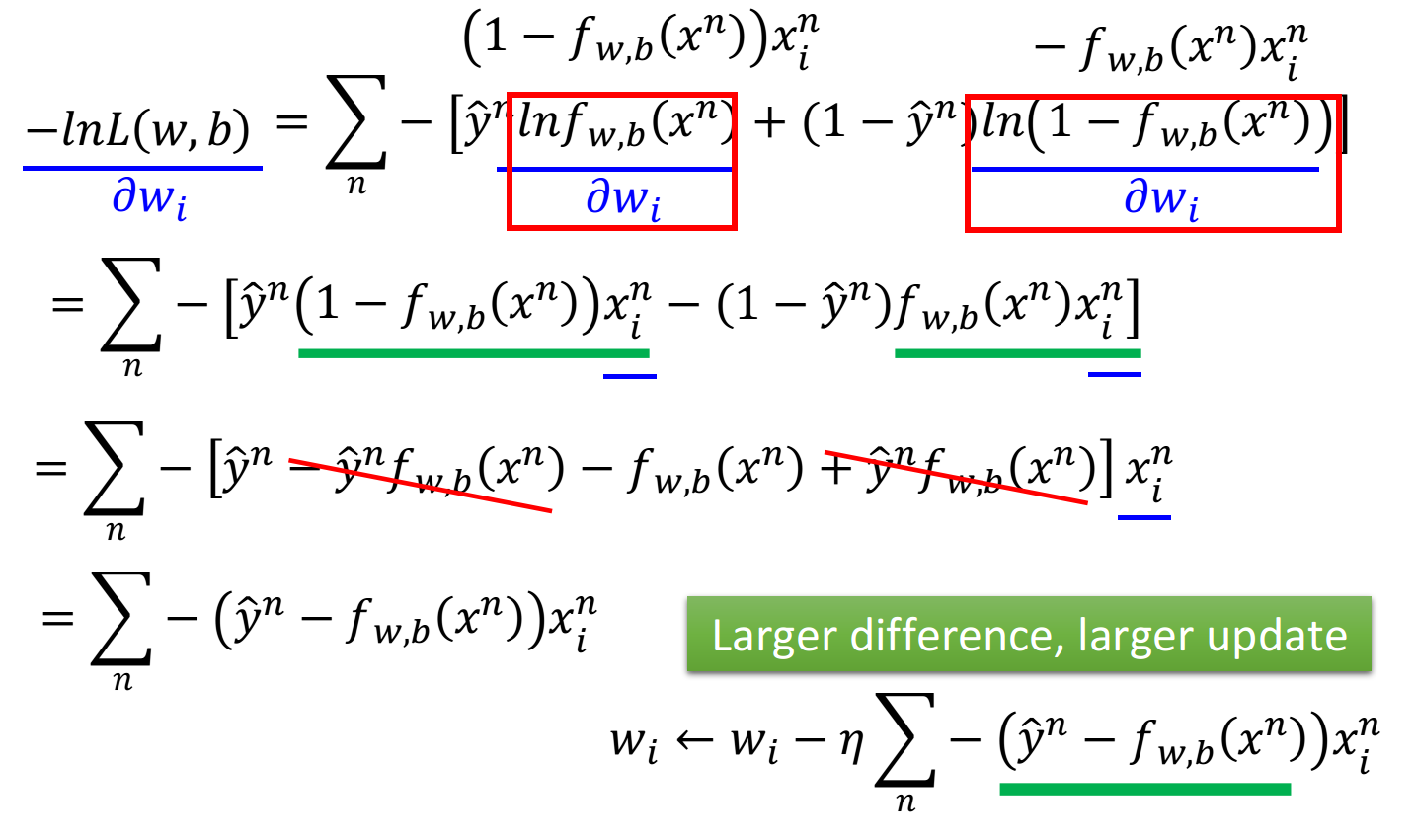
先计算 对 的偏微分 这里 和 是常数先不用管它,只需要分别求出 和 对 的偏微分即可,整体推导过程如下:

将得到的式子进行进一步化简,可得:
梯度:
L: loss function
: parameters(上标表示第几组参数, 下标表示这组参数中的第几个参数)
正好跟gradient descent的目标一致, 因此可以直接用gradient descent来找到最好的参数θ
梯度更新公式: or
我们发现最终的结果竟然异常的简洁,gradient descent每次update只需要做:
那这个式子到底代表着什么意思呢? 现在你的update取决于三件事:
- learning rate, 是你自己设定的
- 来自于data
- 代表function的output跟理想target的差距有多大, 如果离目标越远, update的步伐就要越 大
Logistic Regression V.s. Linear Regression
compare in step1
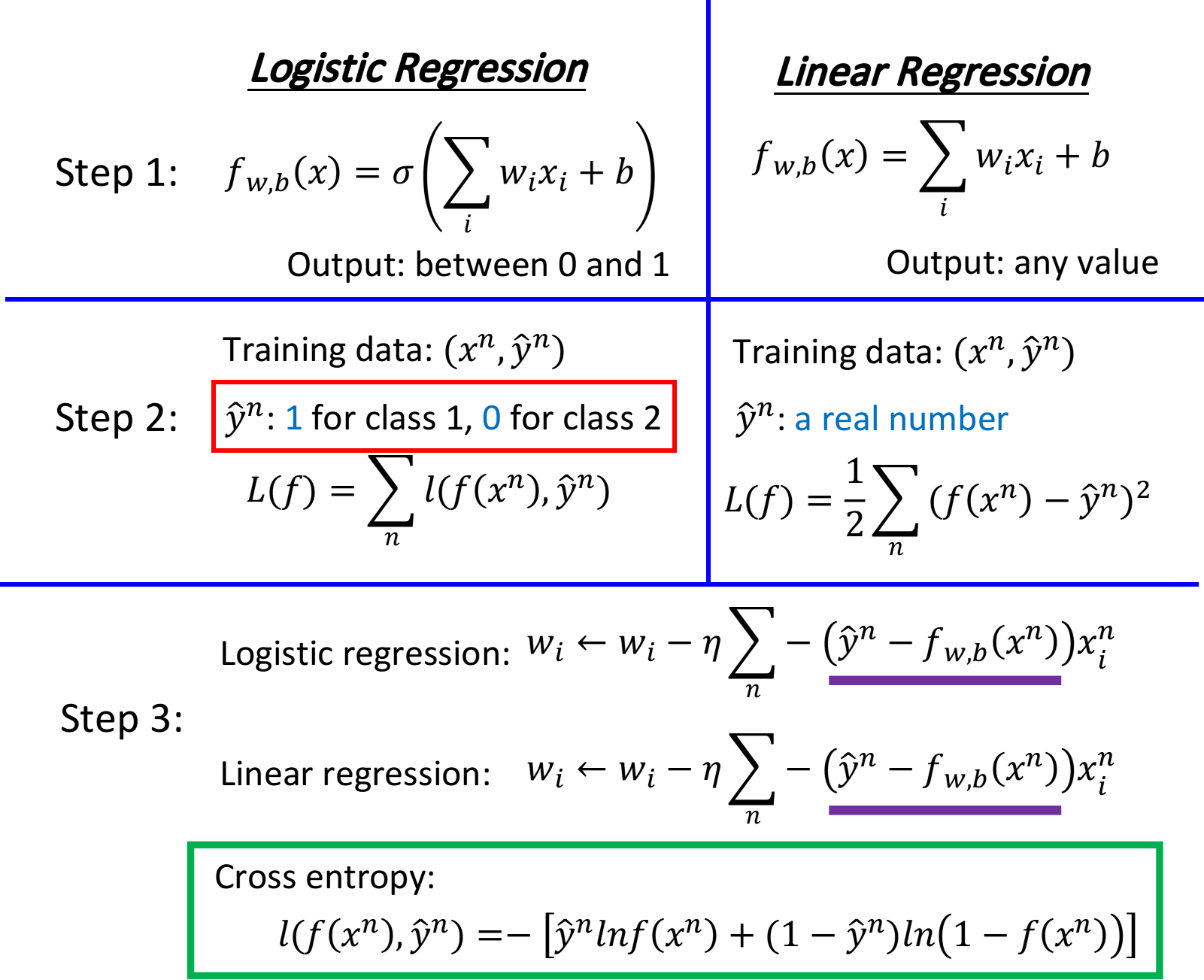
- Logistic Regression是把每一个feature 加权求和, 加上bias, 再通过sigmoid function, 当做function的 output
- 因为Logistic Regression的output是通过sigmoid function产生的, 因此一定是介于0 1之间; 而linear Regression的output并没有通过sigmoid function, 所以它可以是任何值
compare in step2
在Logistic Regression中,我们定义的loss function, 即要去minimize的对象, 是所有example(样本点)的 output )和实际target 在Bernoulli distribution(两点分布)下的cross entropy(交叉嫡)总和
交叉嫡的描述:这里把 和 各自看做是一个Bernoulli distribution(两点分布),那它们的cross entropy 之和, 就是我们要去minimize的对象, 直观来讲, 就
是希望function的output 和它的target 越接近越好
注:这里的“看做"只是为了方便理解和计算,并不是真的做出它们是两点分布的假设
而在linear Regression中, loss function的定义相对比较简单, 就是单纯的function的output 和实际 在数值上的平方和的均值
这里可能会有一个疑惑, 为什么Logistic Regression的loss function不能像linear Regression一样用square error 来表示呢? 后面会有进一步的解释
compare in step3
神奇的是,Logistic Regression和linear Regression的update的方式是一模一样的,唯一不一样的是,Logistic Regression的target 和output 都必须是在0和1之间的,而linear Regression的target和output的范围可以是任意值
Logistic Regression + Square error?
先说结论, 在分类问题中Square error不合适, cross entropy适合于分类问题
Square error求微分情况:
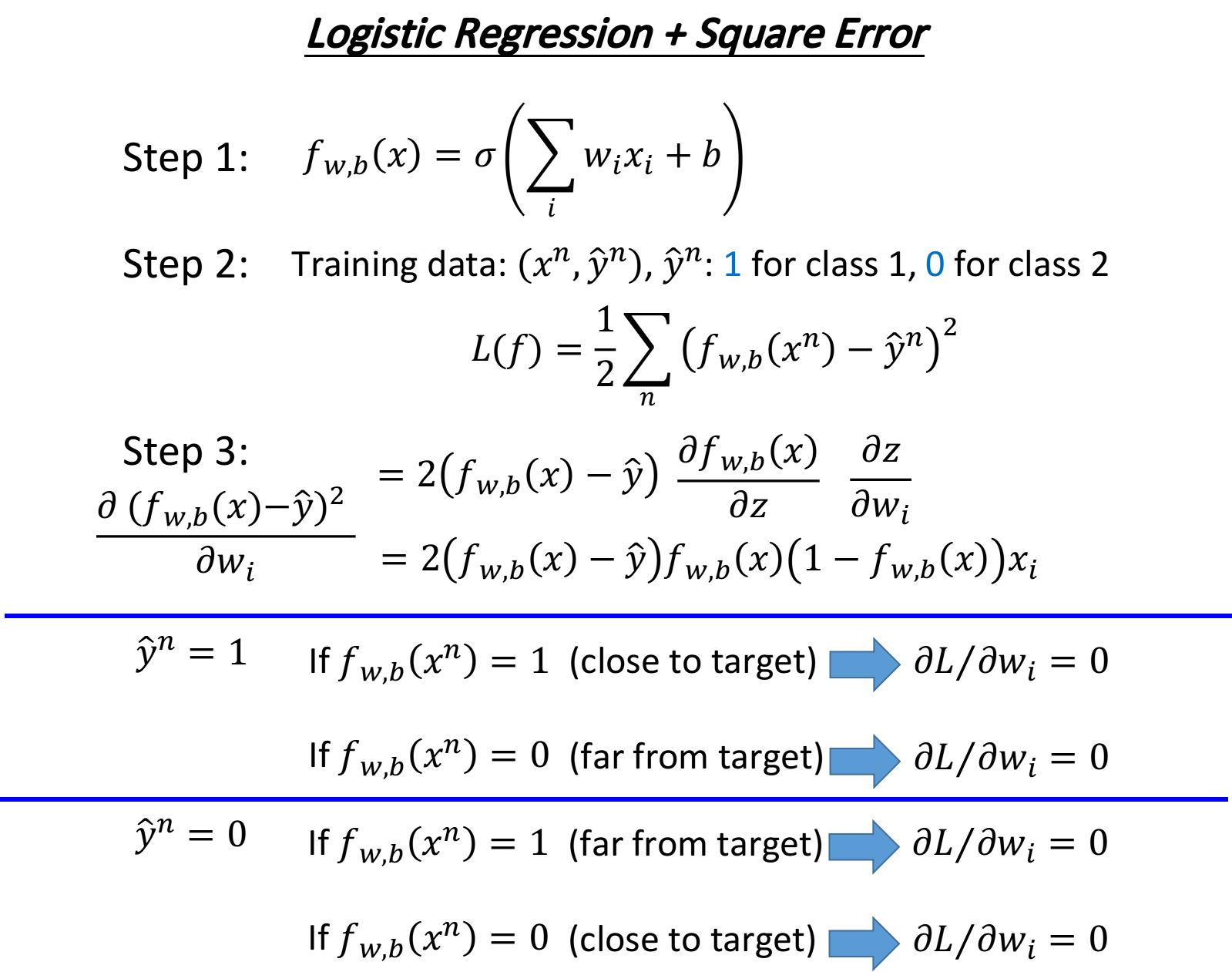
现在会遇到一个问题:如果第n个点的目标target是class 则 此时如果function的output 的话, 说明现在离target很接近了, 一项是0, 于是得到的微分 会变成0,这件事情是很合理的; 但是当function的output 的时候, 说明离target还很遥远, 但是由于在step3中求出来的update表达 式中有一个 因此这个时候也会导致得到的微分 变成0==>简而言之, 微分的结果不便于下一步的gradient descent
如果举class 2的例子,得到的结果与class 1是一样的
如果我们把参数的变化对total loss作图的话, loss function选择cross entropy或square error, 参数的变化跟 loss的变化情况可视化出来如下所示:(黑色的是cross entropy, 红色的是square error)
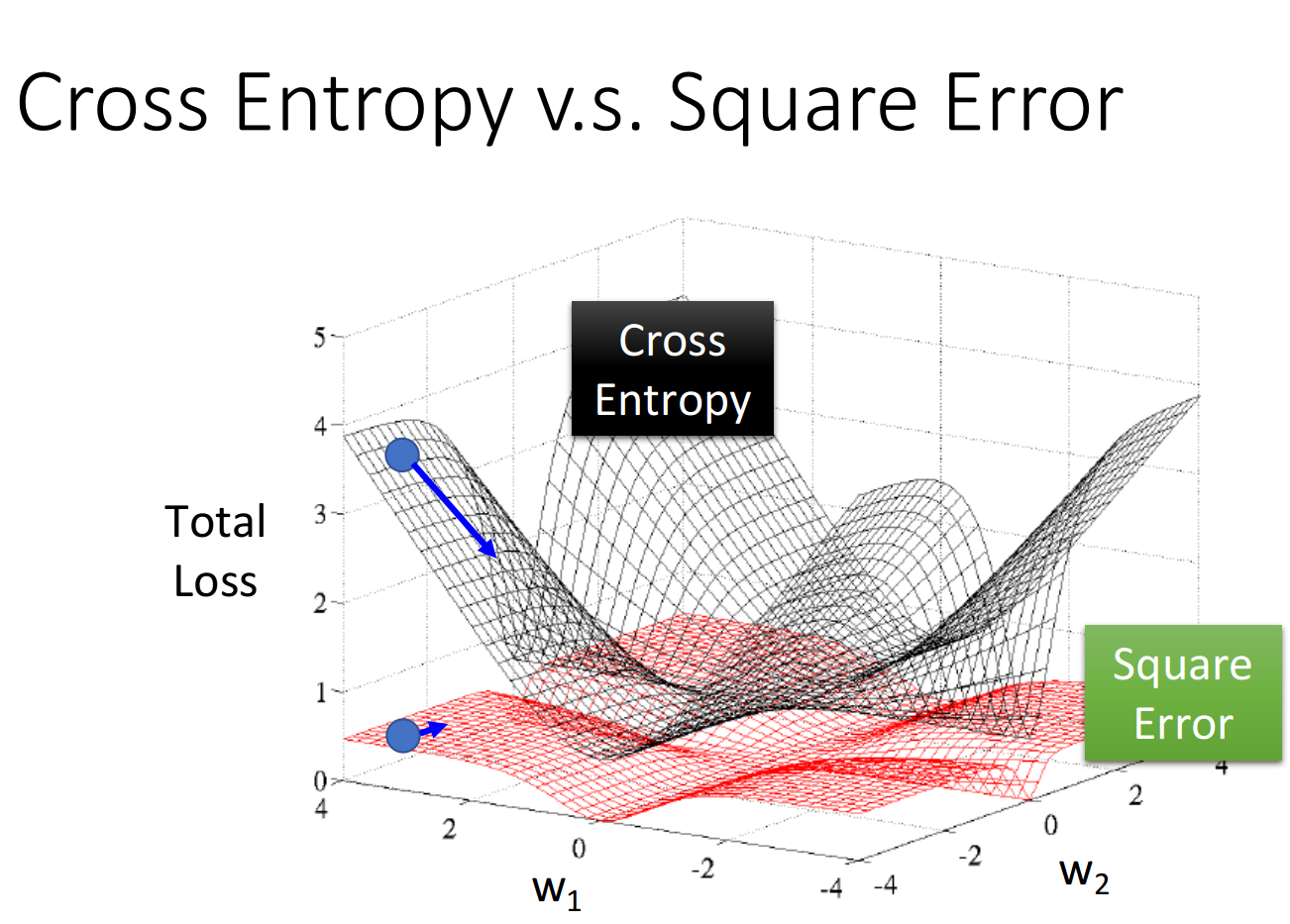
假设中心点就是距离目标很近的地方,如果是cross entropy的话,距离目标越远,微分值就越大,参数update的时候变化量就越大,迈出去的步伐也就越大
但当你选择square error的时候,过程就会很卡,因为距离目标远的时候,微分也是非常小的,移动的速度是非常慢的,我们之前提到过,实际操作的时候,当gradient接近于0的时候,其实就很有可能会停下来,因此使用square error很有可能在一开始的时候就卡住不动了,而且这里也不能随意地增大learning rate,因为在做gradient descent的时候,你的gradient接近于0,有可能离target很近也有可能很远,因此不知道learning rate应该设大还是设小
综上,尽管square error可以使用,但是会出现update十分缓慢的现象,而使用cross entropy可以让你的Training更顺利
Discriminative v.s. Generative
same model but different currency
Logistic Regression的方法,我们把它称之为discriminative的方法;而我们用Gaussian来描述posterior Probability这件事,我们称之为Generative的方法,
实际上它们用的model(function set)是一模一样的, 都是 如果是用Logistic Regression 的话, 可以用gradient descent的方法直接去把b和W找出来; 如果是用Generative model的话,我们要先去算 然后算出b和w
区别在于: 是否有假设?
你会发现用这两种方法得到的b和w是不同的,尽管我们的function set是同一个,但是由于做了不同的假设,最终从同样的Training data里找出来的参数会是不一样的
在Logistic Regression里面,我们没有做任何实质性的假设,没有对Probability distribution有任何的描述,我们就是单纯地去找b和w(推导过程中的假设只是便于理解和计算,对实际结果没有影响)
而在Generative model里面,我们对Probability distribution是有实质性的假设的,之前我们假设的是Gaussian(高斯分布),甚至假设在相互独立的前提下是否可以是naive bayes(朴素贝叶斯),根据这些假设我们才找到最终的b和w
例子: https://sakura-gh.github.io/ML-notes/ML-notes-html/7_Logistic-Regression.html
所以,Generative model和discriminative model的差别就在于,Generative的model它有做了某些假设,假设你的data来自于某个概率模型;而Discriminative的model是完全不作任何假设的, 完全根据数据说话
Generative model做的事情就是脑补,它会自己去想象一些事情,于是会做出一个和我们人类直觉想法不太一样的判断结果,就像toy example里,我们做了naive bayes这样一个假设(事实上我们并不知道这两个feature是否相互独立),于是Naive bayes会在class 2里并没有出现过两个feature都是1的样本点的前提下,自己去脑补有这样的点
通常脑补不是一件好的事情,因为你给你的data强加了一些它并没有告诉你的属性,但是在data很少的情况下,脑补也是有用的,discriminative model并不是在所有的情况下都可以赢过Generative model,discriminative model是十分依赖于data的,当data数量不足或是data本身的label就有一些问题,那Generative model做一些脑补和假设,反而可以把data的不足或是有问题部分的影响给降到最低
Conclusion
对于分类的问题(主要是二元分类),我们一般有两种方法去处理问题,一种是Generative的方法,另一种是Discriminative的方法,注意到分类问题的model都是从贝叶斯方程出发的,即
Generative model的好处是,它对data的依赖并没有像discriminative model那么严重,在data数量少或者data本身就存在noise的情况下受到的影响会更小,而它还可以做到Prior部分与class-dependent部分分开处理,如果可以借助其他方式提高Prior model的准确率,对整一个model是有所帮助的(比如前面提到的语音辨识)
而Discriminative model的好处是,在data充足的情况下,它训练出来的model的准确率一般是比Generative model要来的高的
Multi-class Classification
softmax
softmax的意思是对最大值做强化,因为在做第一步的时候,对取exponential会使大的值和小的值之间的差距被拉得更开,也就是强化大的值
Limitation of Logistic Regression
Logistic Regression其实有很强的限制,给出下图的例子中的Training data,想要用Logistic Regression对它进行分类,其实是做不到的, 如异或
Feature Transformation
如果坚持要用Logistic Regression的话,有一招叫做Feature Transformation,原来的feature分布不好划分,那我们可以将之转化以后,找一个比较好的feature space,让Logistic Regression能够处理
但麻烦的是,我们并不知道怎么做feature Transformation,如果在这上面花费太多的时间就得不偿失了,于是我们会希望这个Transformation是机器自己产生的,怎么让机器自己产生呢?我们可以让很多Logistic Regression cascade(连接)起来
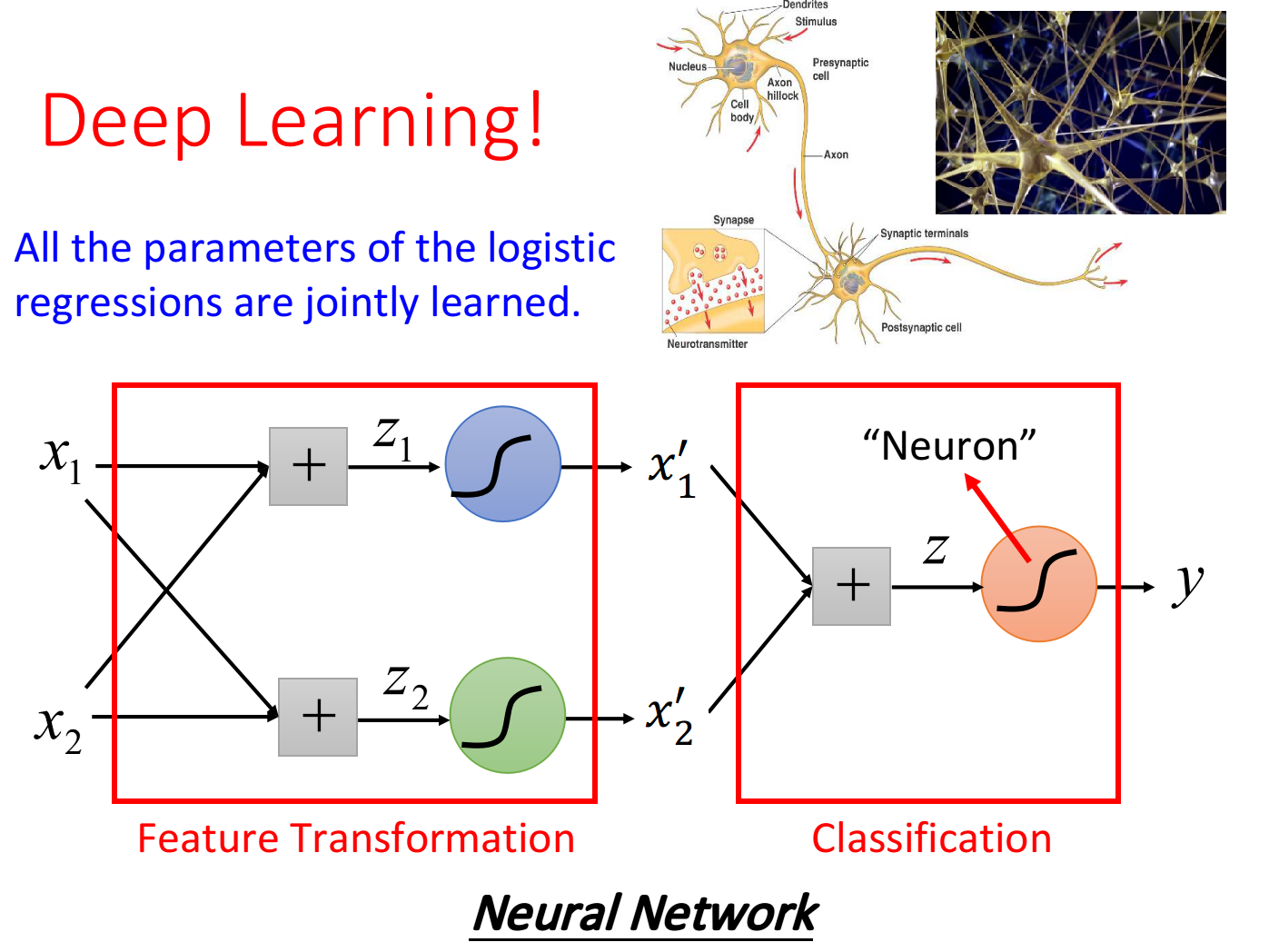
我们让一个input x的两个feature 经过两个Logistic Regression的transform, 得到新的feature 在 这个新的feature space上, class 1和class 2是可以用一条直线分开的, 那么最后只要再接另外一个Logistic Regression的model(对它来说, 才是每一个样本点的"feature", 而不是原先的 它根据新的 feature, 就可以把class 1和class 2分开
Powerful Cascading Logistic Regression
通过上面的例子,我们发现,多个Logistic Regression连接起来会产生powerful的效果,我们把每一个Logistic Regression叫做一个neuron(神经元),把这些Logistic Regression串起来所形成的network,就叫做Neural Network,就是类神经网路,这个东西就是Deep Learning!
8. P12 Brief Introduction of Deep Learning
Ups and downs of Deep Learning
- 1958:Perceptron(linear model),感知机的提出
- 和Logistic Regression类似,只是少了sigmoid的部分
- 1969:Perceptron has limitation,from MIT
- 1980s:Multi-layer Perceptron,多层感知机
- 和今天的DNN很像
- 1986:Backpropagation,反向传播
- Hinton propose的Backpropagation
- 存在problem:通常超过3个layer的neural network,就train不出好的结果
- 、1989: 1 hidden layer is “good enough”,why deep?
- 有人提出一个理论:只要neural network有一个hidden layer,它就可以model出任何的function,所以根本没有必要叠加很多个hidden layer,所以Multi-layer Perceptron的方法又坏掉了,这段时间Multi-layer Perceptron这个东西是受到抵制的
- 2006:RBM initialization(breakthrough):Restricted Boltzmann Machine,受限玻尔兹曼机
- Deep learning -> another Multi-layer Perceptron ?在当时看来,它们的不同之处在于在做gradient descent的时候选取初始值的方法如果是用RBM,那就是Deep learning;如果没有用RBM,就是传统的Multi-layer Perceptron
- 那实际上呢,RBM用的不是neural network base的方法,而是graphical model,后来大家试验得多了发现RBM并没有什么太大的帮助,因此现在基本上没有人使用RBM做initialization了
- RBM最大的贡献是,它让大家重新对Deep learning这个model有了兴趣(石头汤的故事)
- 2009:GPU加速的发现
- 2011:start to be popular in speech recognition,语音识别领域
- 2012:win ILSVRC image competition,Deep learning开始在图像领域流行开来
实际上,Deep learning跟machine learning一样,也是“大象放进冰箱”的三个步骤:
在Deep learning的step1里define的那个function,就是neural network

Neural Network
concept
把多个Logistic Regression前后connect在一起,然后把一个Logistic Regression称之为neuron,整个称之为neural network
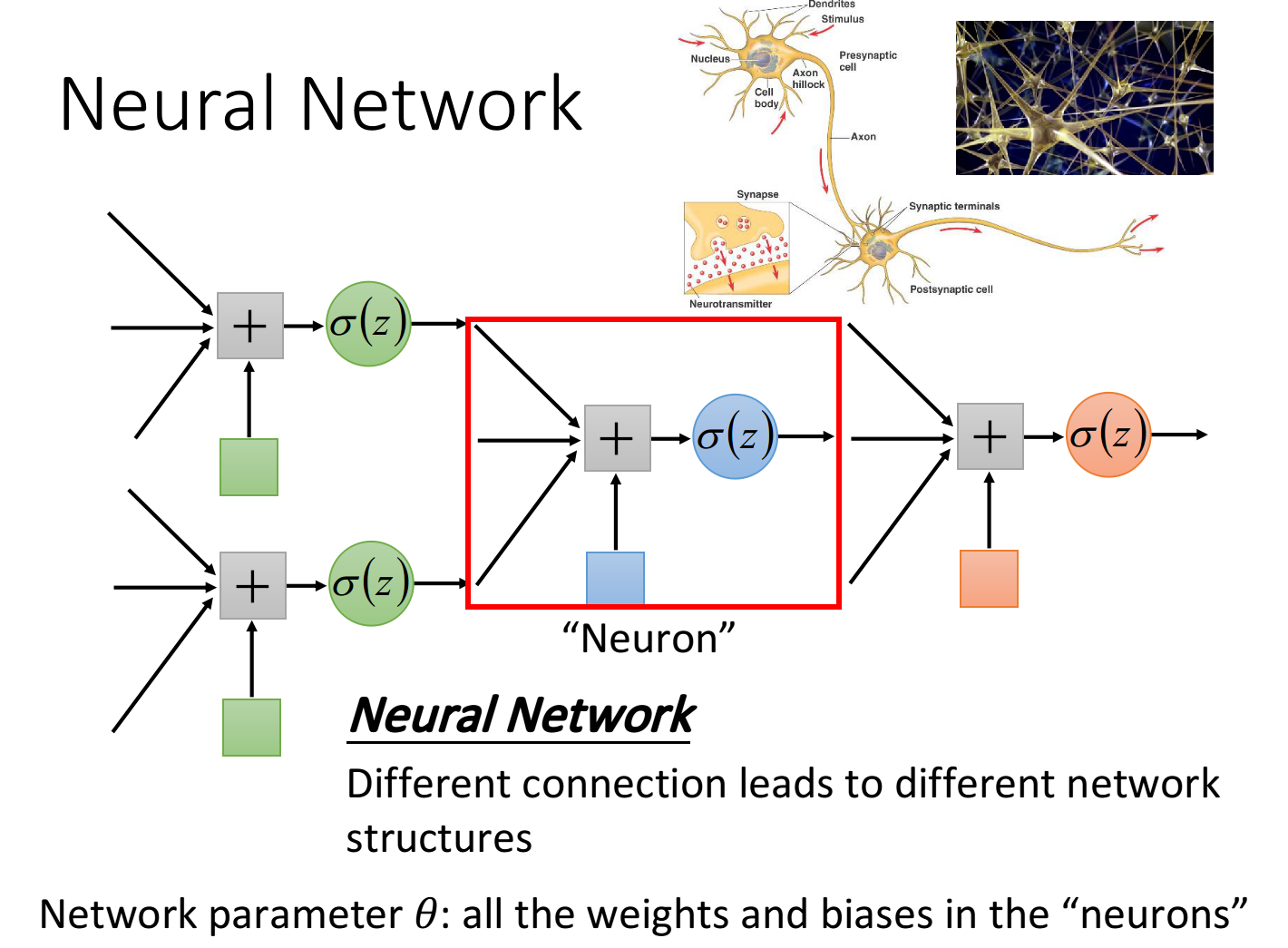
我们可以用不同的方法连接这些neuron,就可以得到不同的structure,neural network里的每一个Logistic Regression都有自己的weight和bias,这些weight和bias集合起来,就是这个network的parameter,我们用来描述
Network Structure
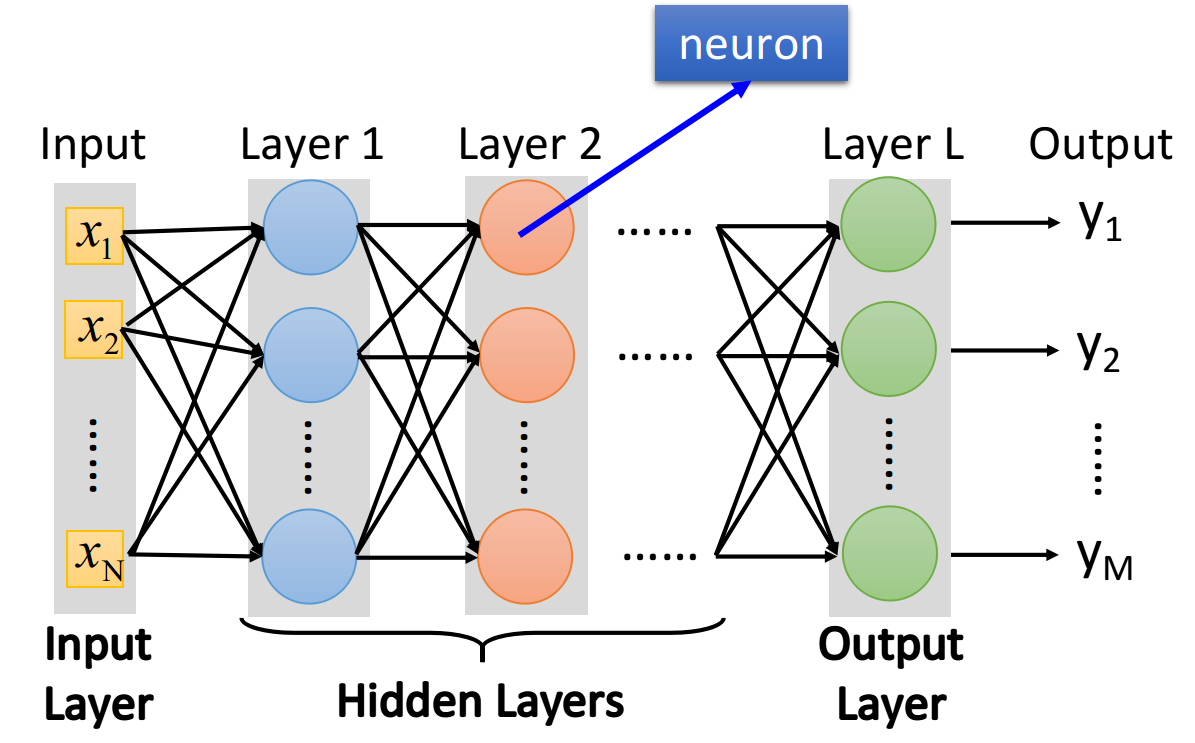
如果一个neural network的参数weight和bias已知的话,它就是一个function,它的input是一个vector,output是另一个vector,这个vector里面放的是样本点的feature,vector的dimension就是feature的个数
- input的地方,叫做input layer,输入层(严格来说input layer其实不是一个layer,它跟其他layer不一样,不是由neuron所组成的)
- output的地方,叫做output layer,输出层
- 其余的地方,叫做hidden layer,隐藏层
- 激活函数: 每一个neuron里面的sigmoid function,在Deep Learning中被称为activation function(激励函数),事实上它不见得一定是sigmoid function,还可以是其他function(sigmoid function是从Logistic Regression迁移过来的,现在已经较少在Deep learning里使用了)
★.network structure+neuron该如何连接在一起的含义: 其实是define了一个function set(model)
Feedforward network
▲.全连接: 因为layer和layer之间,所有的neuron都是两两连接,所以它叫Fully connected的network;因为现在传递的方向是从layer 1->2->3,由后往前传,所以它叫做Feedforward network
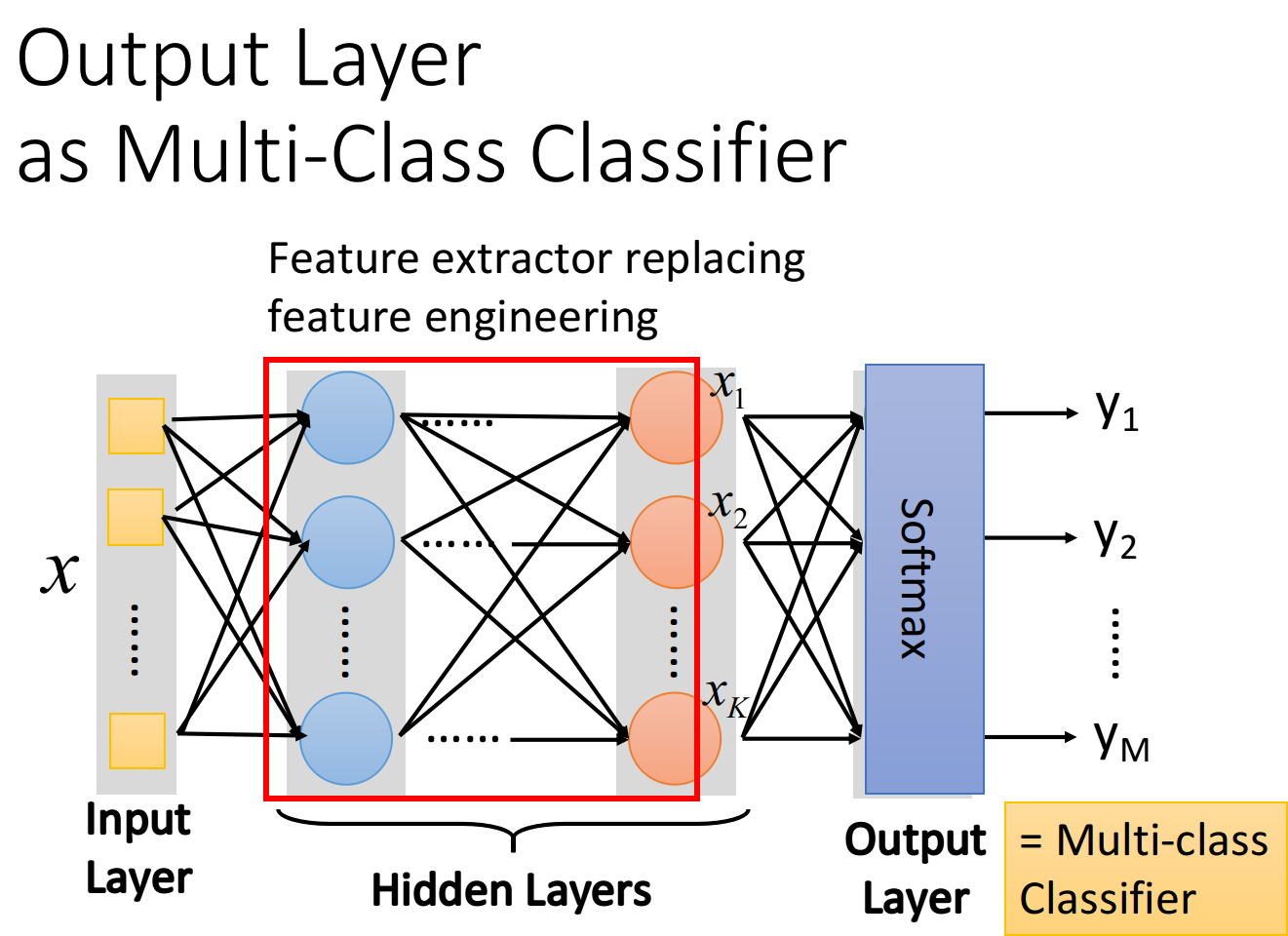
Output Layer
我们可以把hidden layers这部分,看做是一个feature extractor(特征提取器),这个feature extractor就replace了我们之前手动做feature engineering,feature transformation这些事情,经过这个feature extractor得到的就可以被当作一组新的feature
output layer做的事情,其实就是把它当做一个Multi-class classifier,它是拿经过feature extractor转换后的那一组比较好的feature(能够被很好地separate)进行分类的,由于我们把output layer看做是一个Multi-class classifier,所以我们会在最后一个layer加上softmax
整个手写体识别分析:
我们唯一需要的就是一个function,这个function的input是一个256的vector,output是一个10维的vector,这个function就是neural network(这里我们用简单的Feedforward network)
input固定为256维(图片),output固定为10维的feedforward neural network,实际上这个network structure就已经确定了一个function set(model)的形状,在这个function set里的每一个function都可以拿来做手写数字识别,接下来我们要做的事情是用gradient descent去计算出一组参数,挑一个最适合拿来做手写数字识别的function
注:input、output的dimension,加上network structure,就可以确定一个model的形状,前两个是容易知道的,而决定这个network的structure则是整个Deep Learning中最为关键的步骤
所以这里很重要的一件事情是,我们要对network structure进行design,之前在做Logistic Regression或者是linear Regression的时候,我们对model的structure是没有什么好设计的,但是对neural network来说,我们现在已知的constraint只有input是256维,output是10维,而中间要有几个hidden layer,每个layer要有几个neuron,都是需要我们自己去设计的,它们近乎是决定了function set长什么样子
如果你的network structure设计的很差,这个function set里面根本就没有好的function,那就会像大海捞针一样,结果针并不在海里(滑稽
Step 1:Neural Network

intput输入为16*16的图片(256维) -->经过神经网络(函数) --> 输出10维的vector --> 经过softmax函数选出可能性最大的结果输出-output
Step 2:Goodness of function
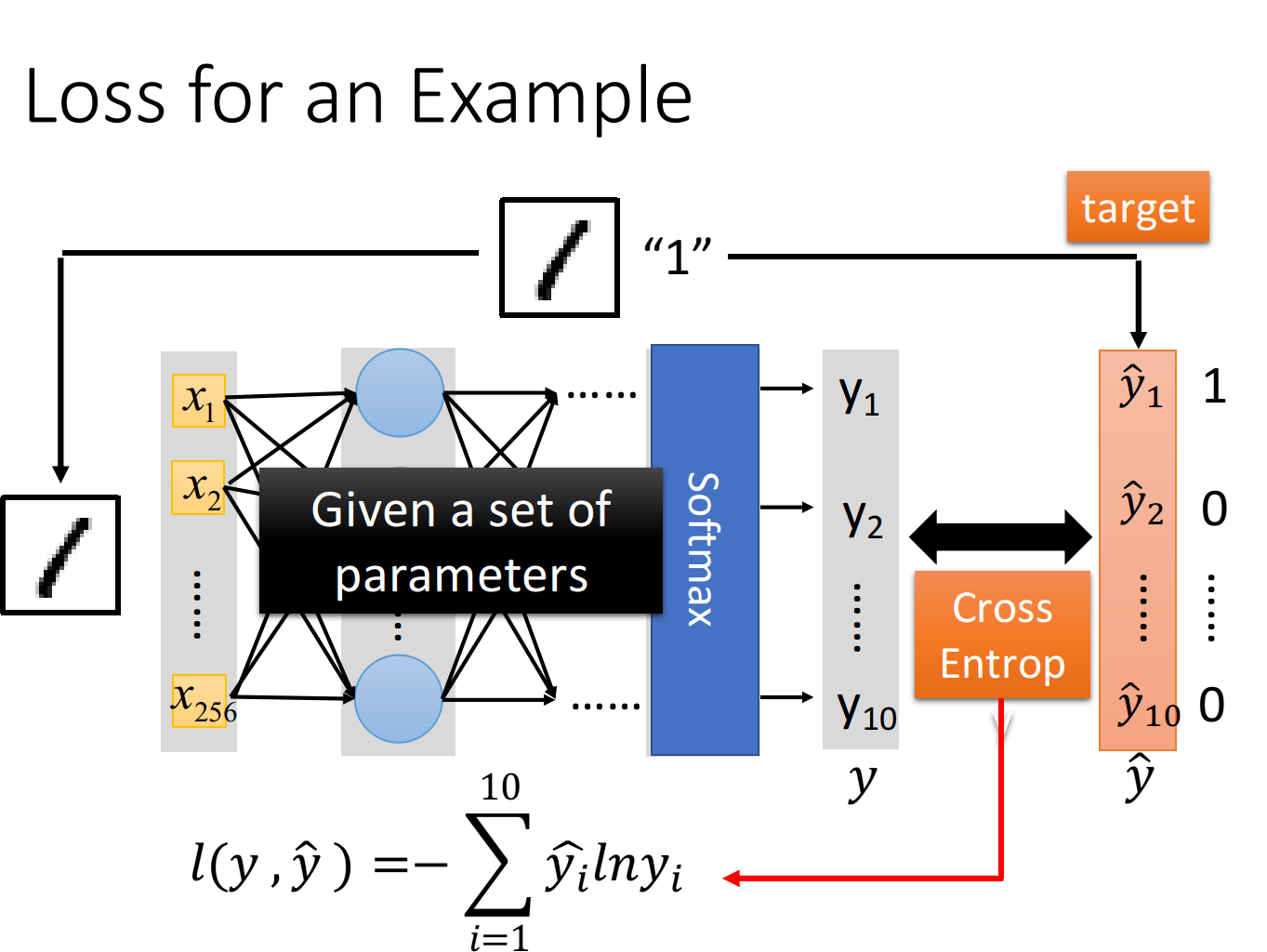
input这张image的256个pixel,通过这个neural network之后,会得到一个output,称之为y;而从这张image的label中转化而来的target,称之为,有了output 和target 之后,要做的事情是计算它们之间的cross entropy(交叉熵),这个做法跟我们之前做Multi-class classification的时候是一模一样的—> 分类问题多使用交叉熵
Cross Entropy lny
Step 3:Pick the best function
接下来就去调整参数,让这个cross entropy越小越好,当然整个training data里面不会只有一笔data,你需要把所有data的cross entropy都sum起来, 得到一个total loss (所有case的Cross Entropy ), 得到loss function之后你要做的事情是找一组network的parameters:。它可以minimize这个total loss,这组parameter对应的function就是我们最终训练好的model
老规矩:我们使用Gradient Descent来优化total loss来获得model。实际上在deep learning里面用gradient descent,跟在linear regression里面使用完全没有什么差别,只是function和parameter变得更复杂了而已,其他事情都是一模一样的。
但是相比在liner model中求导还是比较轻松的, 在network中的function式子到底是长什么样子呢?==> 需要用到反向传播—>但是人工计算是比较复杂的, 因此有了pytorch, tensorflow等微分toolkit可以来计算Backpropagation
Design network structure V.s. Feature Engineering(网络结构设计 vs 特征工程)
deep learning: 通过network 找到一组合适的param来训练, 让机器自动学会如何提取特征==>获得model
传统方法: 通过古圣先贤的先验知识对信息进行特征提取和分析==>获得model
其实network structure的design是一件蛮难的事情,我们到底要怎么决定layer的数目和每一个layer的neuron的数目呢?其实这个只能够凭着经验和直觉、多方面的尝试,有时候甚至会需要一些domain knowledge(专业领域的知识),从非deep learning的方法到deep learning的方法,并不是说machine learning比较简单,而是我们把一个问题转化成了另一个问题
原先非deep learning的model,要得到一个好的结果,往往需要做feature engineering(特征工程),也就是做feature transform,然后找一组好的feature;一开始学习deep learning的时候,好像会觉得deep learning的layers之间也是在做feature transform,但实际上在做deep learning的时候,往往不需要一个好的feature ,比如说在做影像辨识的时候,你可以把所有的pixel直接丢进去,但是在过去做图像识别,你是需要对图像抽取出一些人定的feature出来的,这件事情就是feature transform,但是有了deep learning之后,你完全可以直接丢pixel进去硬做
但是,今天deep learning制造了一个新的问题,它所制造的问题就是,你需要去design network的structure,所以你的问题从本来的如何抽取feature==>(转化成)怎么design network structure,所以deep learning是不是真的好用,取决于你觉得解决哪一个问题比较容易(如,以前做音频识别需要知道DFT些信号处理知识和方法,现在完全可以交给机器,让其自己学会DFT)
如果是影响辨识或者是语音辨识的话,design network structure可能比feature engineering要来的容易,因为,虽然我们人都会看、会听,但是这件事情,它太过潜意识了,它离我们意识的层次太远,我们无法意识到,我们到底是怎么做语音辨识这件事情,所以对人来说,你要抽一组好的feature,让机器可以很方便地用linear的方法做语音辨识,其实是很难的,因为人根本就不知道好的feature到底长什么样子;所以还不如design一个network structure,或者是尝试各种network structure,让machine自己去找出好的feature,这件事情反而变得比较容易,对影像来说也是一样的
有这么一个说法:deep learning在NLP上面的performance并没有那么好。语音辨识和影像辨识这两个领域是最早开始用deep learning的,一用下去进步量就非常地惊人,比如错误率一下子就降低了20%这样,但是在NLP上,它的进步量似乎并没有那么惊人,甚至有很多做NLP的人,现在认为说deep learning不见得那么work,这个原因可能是,人在做NLP这件事情的时候,由于人在文字处理上是比较强的,比如叫你设计一个rule去detect一篇document是正面的情绪还是负面的情绪,你完全可以列表,列出一些正面情绪和负面情绪的词汇,然后看这个document里面正面情绪的词汇出现的百分比是多少,你可能就可以得到一个不错的结果。所以NLP这个task,对人来说是比较容易设计rule的,你设计的那些ad-hoc(特别的)的rule,往往可以得到一个还不错的结果,这就是为什么deep learning相较于NLP传统的方法,觉得没有像其他领域一样进步得那么显著(但还是有一些进步的)===>简言之, 这个语言问题较为容易研究, 以及前人传统方法研究已经非常深入, 效果也较好, 因此机器学习并没有太多的提升
长久而言,可能文字处理中会有一些隐藏的资讯是人自己也不知道的,所以让机器自己去学这件事情,还是可以占到一些优势,只是眼下它跟传统方法的差异看起来并没有那么的惊人,但还是有进步的
P15Why Deep-

Q:参数变多,是变宽还是变深呢? 是不是暴力的方法呢?
A:
- 论文比较相同参数, 深度效果好于宽度;
- DNN结构一个很大的优势是,Modularization(模块化),它用的是结构化的架构
Modularization
就像写程序一样,shallow network实际上就是把所有的程序都写在了同一个main函数中,所以它去检测不同的class使用的方法是相互独立的;而deep network则是把整个任务分为了一个个小任务,每个小任务又可以不断细分下去,以形成modularization,就像下图一样
在DNN的架构中,实际上每一层layer里的neuron都像是在解决同一个级别的任务,它们的output作为下一层layer处理更高级别任务的数据来源,低层layer里的neuron做的是对不同小特征的检测,高层layer里的neuron则根据需要挑选低层neuron所抽取出来的不同小特征,去检测一个范围更大的特征;neuron就像是一个个classifier ,后面的classifier共享前面classifier的参数
这样做的好处是,低层的neuron输出的信息可以被高层不同的neuron重复使用,而并不需要像shallow network一样,每次在用到的时候都要重新去检测一遍,因此大大降低了程序的复杂度
-
理解效果:模组化: 如分类长发的女孩、长头发的男孩、短发的女孩、短发男孩。
如果按照shallow network的想法,我们分别独立地train四个classifier(其实就相当于训练四个独立的model),然后就可以解决这个分类的问题。但是显而易见的是长头发的男生样本会非常少,没有太多的training data,所以,你train出来的classifier就比较weak,去detect长头发男生的performance就比较差

但其实我们的input并不是没有关联的,长头发的男生和长头发的女生都有一个共同的特征,就是长头发,因此如果我们分别独立地训练四个model作为分类器,实际上就是忽视了这个共同特征,也就是没有高效地用到data提供的全部信息,这恰恰是shallow network的弊端
而利用modularization的思想,使用deep network的架构,我们可以训练一个model作为分类器就可以完成所有的任务,我们可以把整个任务分为两个子任务:
- Classifier1:检测是男生或女生
- Classifier2:检测是长头发或短头发
虽然长头发的男生data很少,但长头发的人的data就很多,经过前面几层layer的特征抽取,就可以头发的data全部都丢给Classifier2,把男生或女生的data全部都丢给Classifier1,这样就真正做到了充分、高效地利用数据,最终的Classifier再根据Classifier1和Classifier2提供的信息给出四类人的分类结果
你会发现,经过层层layer的任务分解,其实每一个Classifier要做的事情都是比较简单的,又因为这种分层的、模组化的方式充分利用了data,并提高了信息利用的效率,所以只要用比较少的training data就可以把结果train好

deep -> modularization
做modularization的好处是把原来比较复杂的问题变得简单,比如原来的任务是检测一个长头发的女生,但现在你的任务是检测长头发和检测性别,而当检测对象变简单的时候,就算training data没有那么多,我们也可以把这个task做好,并且所有的classifier都用同一组参数检测子特征,提高了参数使用效率,这就是modularization、这就是模块化的精神
由于deep learning的deep就是在做modularization这件事,所以它需要的training data反而是比较少的,这可能会跟你的认知相反,AI=big data+deep learning,但deep learning其实是为了解决less data的问题才提出的
每一个neuron其实就是一个basic的classifier:
- 第一层neuron,它是一个最basic的classifier,检测的是颜色、线条这样的小特征
- 第二层neuron是比较复杂的classifier,它用第一层basic的classifier的output当作input,也就是把第一层的classifier当作module,利用第一层得到的小特征分类出不同样式的花纹
- 而第三层的neuron又把第二层的neuron当作它module,利用第二层得到的特征分类出蜂窝、轮胎、人
- 以此类推

这边要强调的是,在做deep learning的时候,怎么做模块化这件事情是machine自动学到的,也就是说,第一层要检测什么特征、第二层要检测什么特征…这些都不是人为指定的,人只有定好有几层layer、每层layer有几个neuron,剩下的事情都是machine自己学到的
传统的机器学习算法,是人为地根据domain knowledge指定特征来进行提取,这种指定的提取方式,甚至是提取到的特征,也许并不是实际最优的,所以它的识别成功率并没有那么高;但是如果提取什么特征、怎么提取这件事让机器自己去学,它所提取的就会是那个最优解,因此识别成功率普遍会比人为指定要来的高
Conclusion
Deep总结:
- 考虑input之间的内在关联,所有的class用同一个model来做分类
- modularization思想,复杂问题简单化,把检测复杂特征的大任务分割成检测简单特征的小任务
- 所有的classifier使用同一组参数的子特征检测器,共享检测到的子特征
- 不同的classifier会share部分的参数和data,效率高
- 联系logic circuit和剪纸画的例子
- 多层hidden layer对complex问题的处理上比较有优势
9. P13Backpropagation
Backpropagation是神经网络中用来做gradient descent的方法, 目的是使优化函数尽可能得变成我们想要的, 假设我们现在要处理的是分类任务,loss function为交叉熵, total loss为
我们把training data里任意一个样本点 代到neural network里面, 它会output一个 我们把这个output跟样 本点本身的label标注的target 作cross entropy, 这个交叉嫡定义了output 与target 之间的距离 。 如果cross entropy比较大的话, 说明output和target之间距离很远, 这个network的parameter的loss是比较大 的, 反之则说明这组parameter是比较好的, 然后总和所有training data的cross entropy 得到total loss 这就是我们的loss function, 用这个 对某一个参数w做偏微分, 表达式如下:
这个表达式告诉我们, 只需要考虑如何计算对某一笔data的 再将所有training data的cross entropy对参数 w的偏微分累计求和, 就可以把total loss对某一个参数w的偏微分给计算出来。
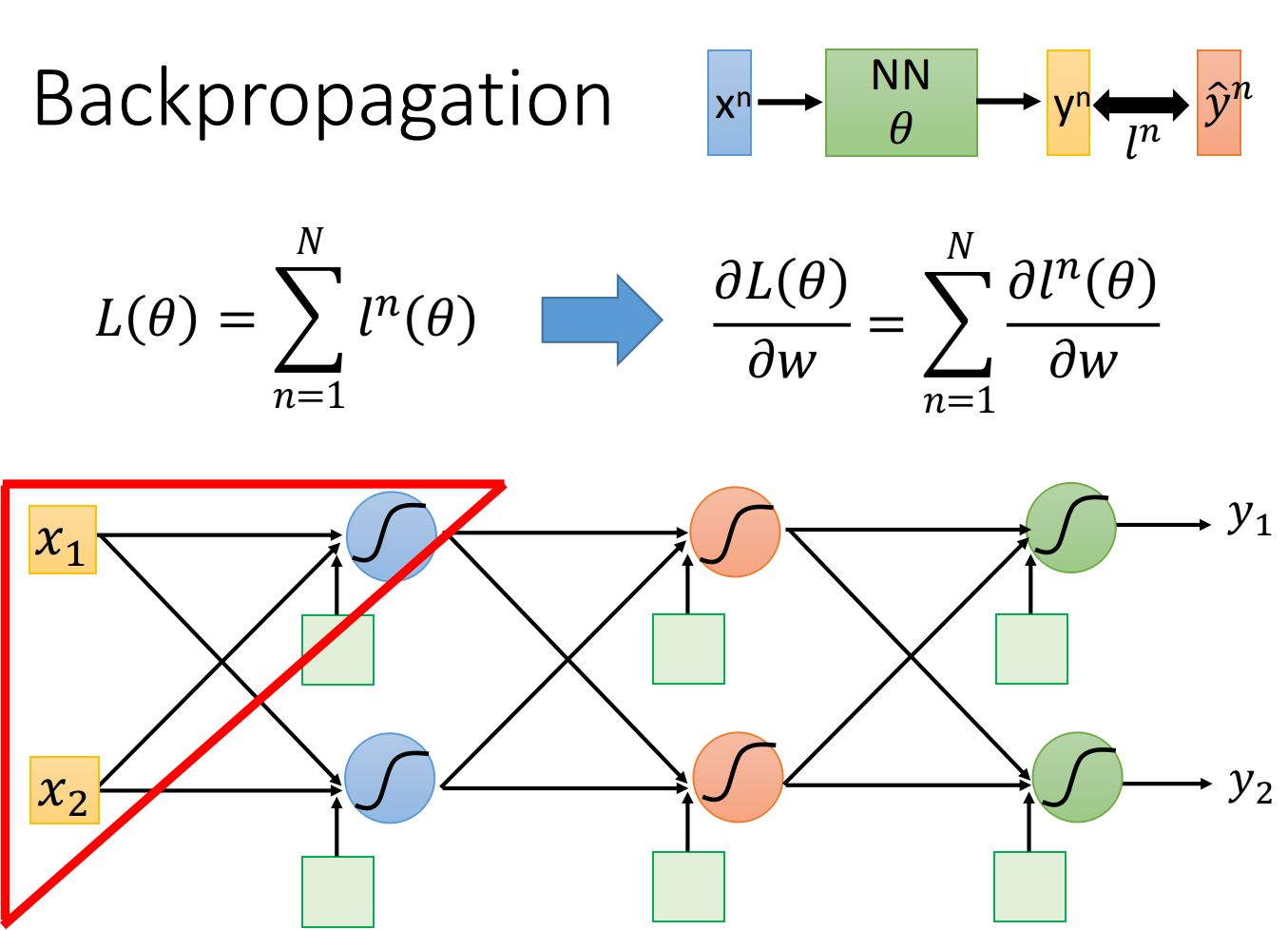
我们逐一分析,我们先考虑某一个neuron, 先拿出上图中被红色三角形圈住的neuron, 假设只有两个input 通过这个 neuron, 我们先得到 然后经过activation function从这个neuron中output出来, 作为后 续neuron的input, 再经过了非常非常多的事情以后, 会得到最终的output
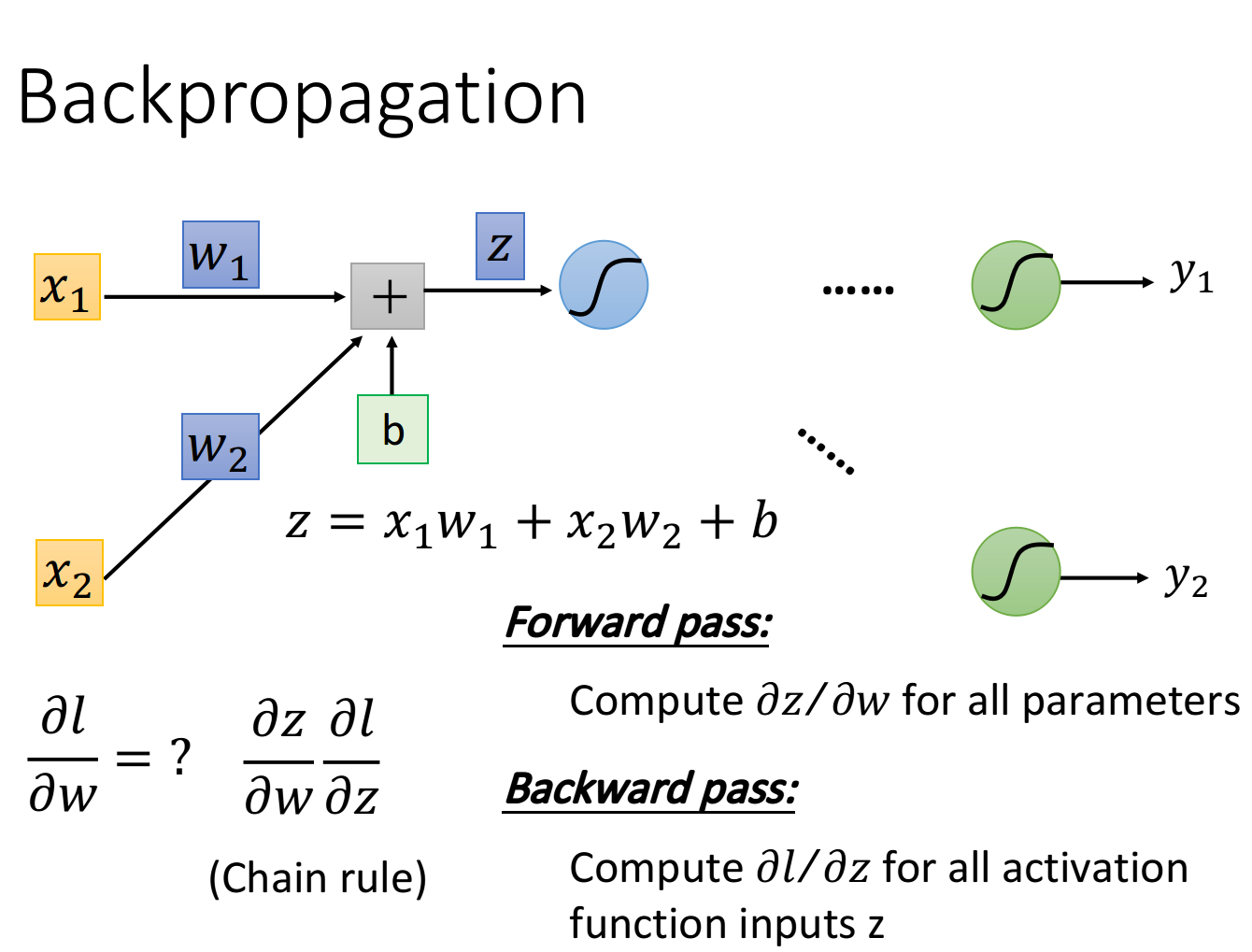
现在的问题是这样: 该怎么算? 按照chain rule, 可以把它拆分成两项, 这两项分别去把它计算
出来。前面这一项是比较简单的, 后面这一项是比较复杂的
计算前面这一项 的这个process, 我们称之为Forward pass; 而计算后面这项 的process, 我们称之为 Backward pass
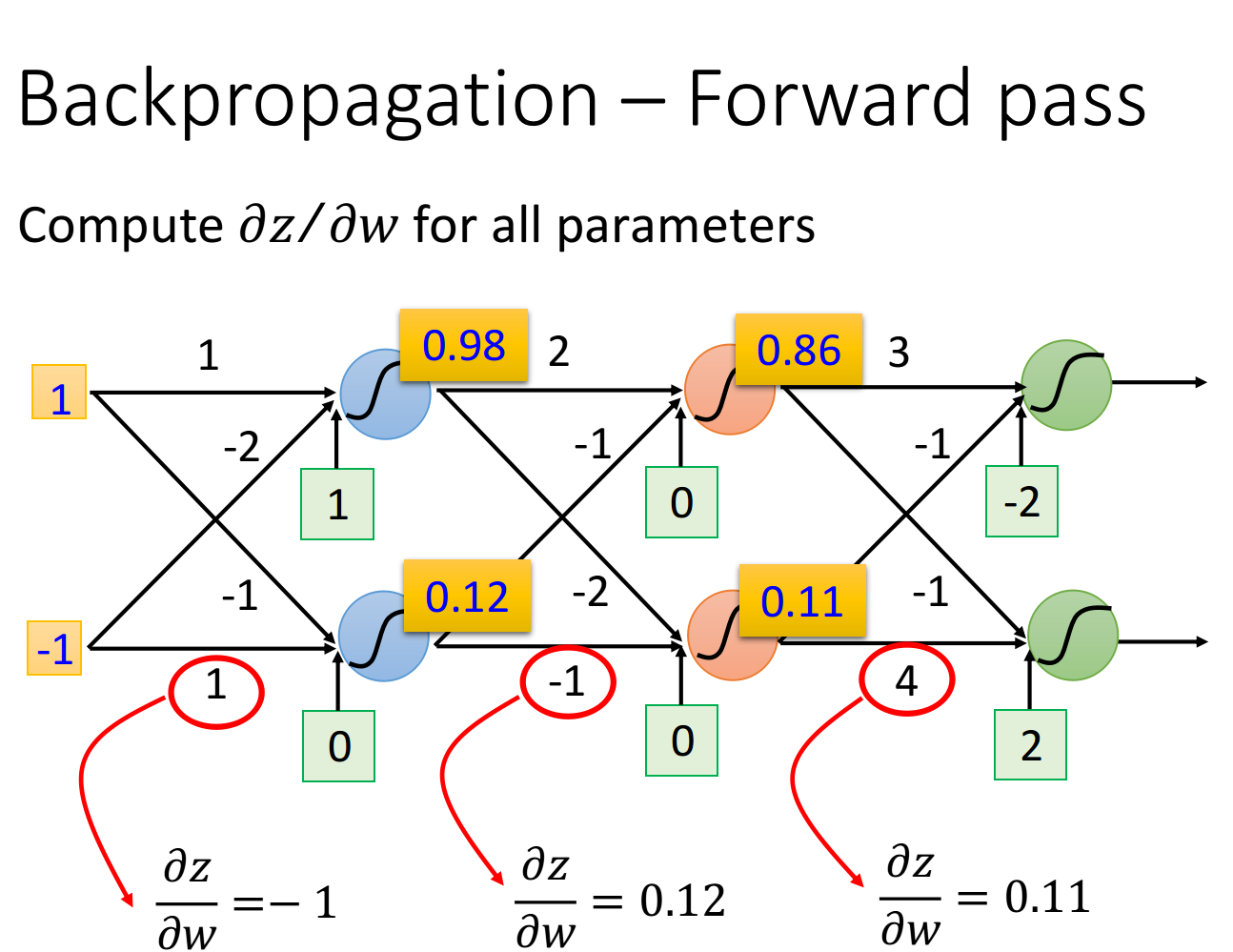
Forward pass
先考虑 这一项, 完全可以秒算出来,
它的规律是这样的:求 就是看w前面连接的input是什么, 那微分后的 值就是什么,因此只要计算出 neural network里面每一个neuron的output就可以知道任意的z对W的偏微分
- 比如input layer作为neuron的输入时,前面连接的是,所以微分值就是;前面连接的是,所以微分值就是
- 比如hidden layer作为neuron的输入时,那该neuron的input就是前一层neuron的output,于是的值就是前一层的z经过activation function之后输出的值(下图中的数据是假定activation function为sigmoid function得到的)
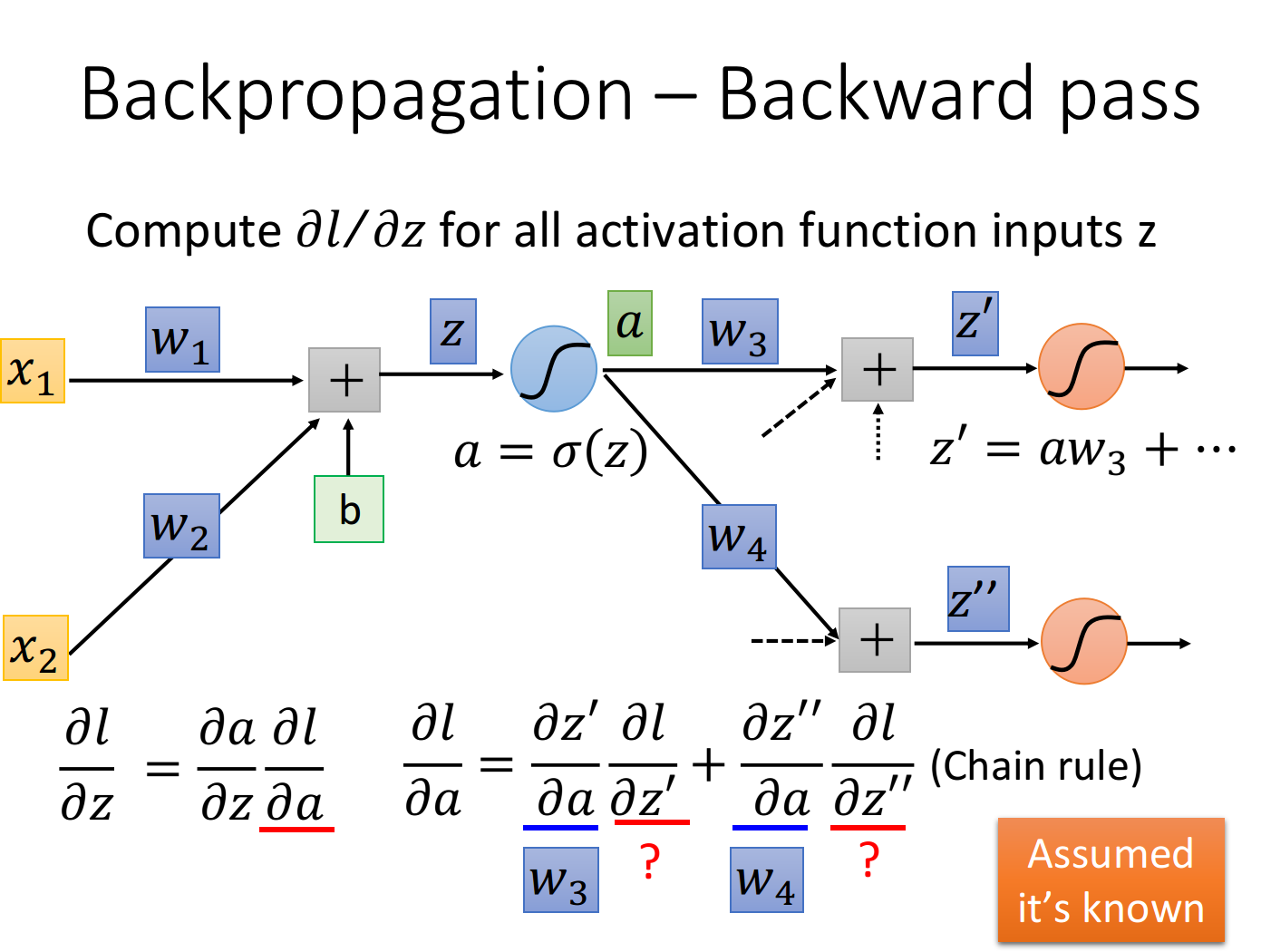
Backward pass
再考虑 这一项, 它是比较复杂的, 这里我们依旧假设activation function是sigmoid function
公式推导
我们的z通过activation function得到a, 这个neuron的output是 接下来这个a会乘上某一个weight 再加上其它一大堆的value得到 它是下一个neuron activation function的input, 然后a又会乘上另一个 weight 再加上其它一雄value得到 后面还会发生很多很多其他事情, 不过这里我们就只先考虑下一步会 发生什公事情:
这里的 实际上就是1. activation function的微分(在这里就是sigmoid function的微分),接下来的问题是 应该长 什么样子呢? a会影响 和 而 和 会影响 所以通过chain rule可以得到
这里的 那 和 又该怎么算呢? 这里先假设我们已经通过某种方法把 和 这两项给算出来了,然后回过头去就可以把 给轻易地算出来 ==> 上面是个递归的过程,因此需要从output计算
case 1: Output Layer
假设蓝色的这个neuron已经是hidden layer的最后一层了, 也就是说连接在 和 后的这两个红色的neuron已经 是output layer, 它的output就已经是整个network的output了, 这个时候计算就比较简单
其中 就是output layer的activation function (softmax) 对 的偏微分
而 就是loss function对 的偏微分, 它取决于你的loss function是怎么定义的, 也就是你的output和target之间是怎么 evaluate的, 你可以用cross entropy, 也可以用mean square error, 用不同的定义, 的值就不一样
这个时候, 你就已经可以把l对 和 的偏微分 算出来了
另一个观点——反向计算的一句
这个式子还是蛮简单的, 然后, 我们可以从另外一个观点来看待这个式子
你可以想象说, 现在有另外一个neuron, 它不在我们原来的network里面, 在下图中它被画成三角形, 这个 neuron的input就是 和 那input 就乘上 input 就乘上 它们两个相加再乘上activation
function的微分 就可以得到output
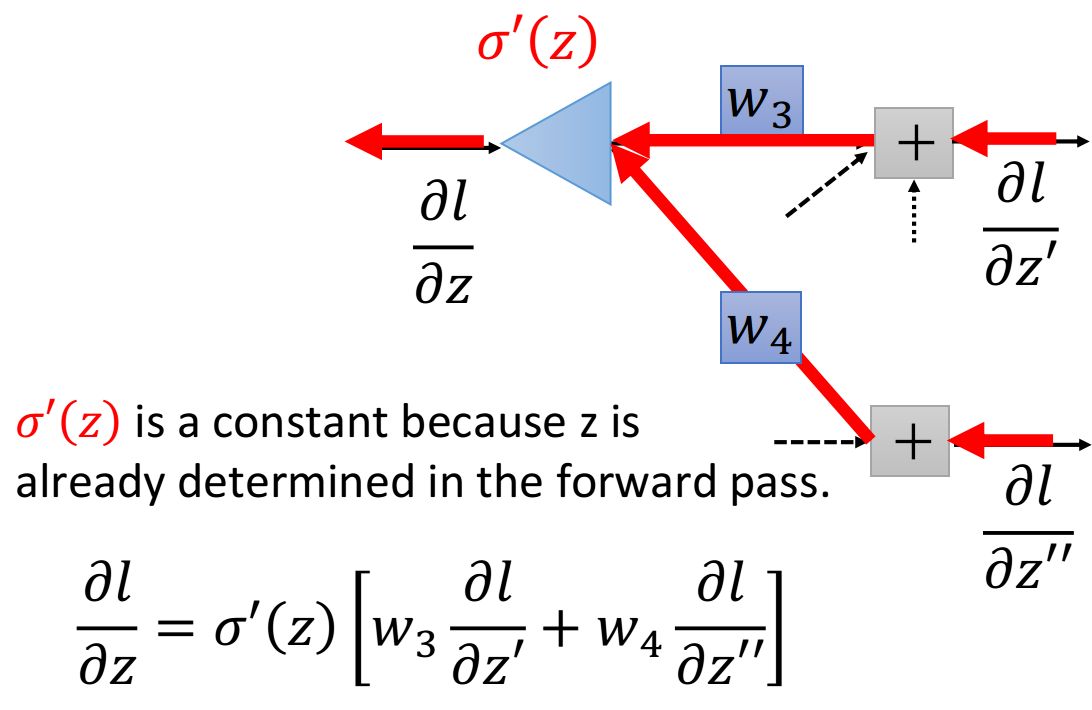
这张图描述了一个新的“neuron",它的含义跟图下方的表达式是一模一样的, 作这张图的目的是为了方便理解
值得注意的是, 这里的 是一个constant常数, 它并不是一个function, 因为z其实在计算forward pass的时候 就已经被决定好了, z是一个固定的值
所以这个neuron其实跟我们之前看到的sigmoid function是不一样的, 它并不是把input通过一个non-linear进行 转换, 而是直接把input乘上一个constant 就得到了output, 因此这个neuron被画成三角形, 代表它跟我 们之前看到的圆形的neuron的运作方式是不一样的, 它是直接乘上一个constant(这里的三角形有点像电路里的运 算放大器op-amp, 它也是乘上一个constant)
知道 和 就可以知道 知道 和 就可以知道 现在这个过程就可以反复进行下去, 直到找到output layer, 我们可以算出确切的值, 然后再一层一层反推回去
你可能会想说, 这个方法听起来挺让人崩溃的, 每次要算一个微分的值, 都要一路往后走, 一直走到network的 output, 如果写成表达式的话, 一层一层往后展开, 感觉会是一个很可怕的式子, 但是! 实际上并不是这个样子 做的
你只要换一个方向, 从output layer的 开始算, 你就会发现它的运算量跟原来的network的Feedforward path 其实是一样的
▲注: 如果是正向做Backward pass的话, 实际上每次计算一个 就需要把该neuron后面所有的 都给计算一 遍, 会造成很多不必要的里复运算, 如果写成code的形式, 就相当于调用了很多次里复的函数; 而如果是反向做 Backward pass,实际上就是把这些调用函数的过程都变成调用“值"的过程, 因此可以直接计算出结果, 而不需要 占用过多的堆栈空间
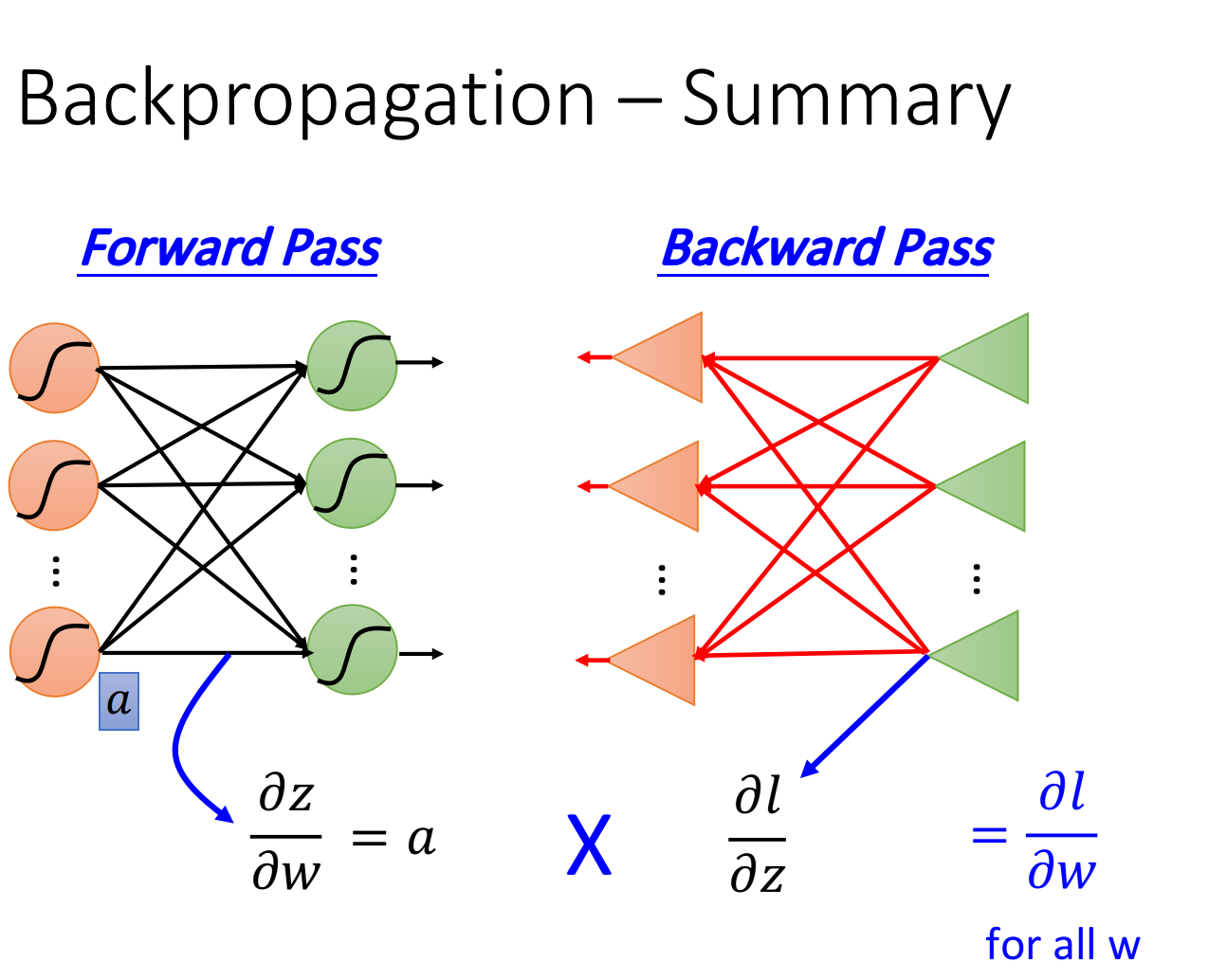
Summary
最后,我们来总结一下Backpropagation是怎么做的
Forward pass,每个neuron的activation function的output,就是它所连接的weight的
Backward pass,建一个与原来方向相反的neural network,它的三角形neuron的output就是
把通过forward pass得到的和通过backward pass得到的乘起来就可以得到对的偏微分
11. P17Convolutional Neural Network
11_Convolutional Neural Network part1
12_Convolutional Neural Network part2
12. P14Tips for Training DNN
包含卷积层和池化层,主要用来识别位移、缩放及其他形式扭曲不变性的二维图形。特殊性特显在1.神经元之间的连接是非全连接的,2.同一层中某些神经元的连接权重是共享的(即相同的)==>从而减少了权值的数量、降低了模型的复杂
P13. Recurrent Neural Network (Part I)
P14. Recurrent Neural Network (Part II)
P22Semi-supervised
P23Unsupervised Learning - Word Embedding
P24Explainable ML (1_8)
P33Attack ML Models (1_8)
P43Network Compression (1_6)
P51Conditional Generation by RNN & Attention
P52Pointer Network
P53Recursive
P54Transformer
P56Unsupervised Learning - Linear Methods
P57Unsupervised Learning - Neighbor Embedding
P58Unsupervised Learning - Auto-encoder
自编码模型(Auto-encoder AE),是一种无监督学习算法,使用了反向传播算法,让目标值等于输入值
P63ELMO, BERT, GPT
P65Anomaly Detection (1_7)
P72Generative Adversarial Network(1_10)——GAN
P83Transfer Learning
P86Meta Learning – MAML (1_9)
P100Life Long Learning (1_7)
P108Deep Reinforcemen Learning(3_1)
P111RL Advanced Version_1_Policy Gradient
附录
机器学习系列10-手写数字识别(Keras2.0) ——10_Keras
机器学习系列6-分类问题(概率生成模型)
P16PyTorch Tutorial
P8Optimization for Deep Learning (1_2) (选学)
Author: Mrli
Link: https://nymrli.top/2020/11/17/李宏毅机器学习-摘要/
Copyright: All articles in this blog are licensed under CC BY-NC-SA 3.0 unless stating additionally.